- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄377000 > DSP16210 TVS 400W 6.5V UNIDIRECT SMA PDF資料下載
參數(shù)資料
| 型號(hào): | DSP16210 |
| 英文描述: | TVS 400W 6.5V UNIDIRECT SMA |
| 中文描述: | DSP16210數(shù)字信號(hào)處理器 |
| 文件頁(yè)數(shù): | 158/173頁(yè) |
| 文件大小: | 2621K |
| 代理商: | DSP16210 |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)第31頁(yè)第32頁(yè)第33頁(yè)第34頁(yè)第35頁(yè)第36頁(yè)第37頁(yè)第38頁(yè)第39頁(yè)第40頁(yè)第41頁(yè)第42頁(yè)第43頁(yè)第44頁(yè)第45頁(yè)第46頁(yè)第47頁(yè)第48頁(yè)第49頁(yè)第50頁(yè)第51頁(yè)第52頁(yè)第53頁(yè)第54頁(yè)第55頁(yè)第56頁(yè)第57頁(yè)第58頁(yè)第59頁(yè)第60頁(yè)第61頁(yè)第62頁(yè)第63頁(yè)第64頁(yè)第65頁(yè)第66頁(yè)第67頁(yè)第68頁(yè)第69頁(yè)第70頁(yè)第71頁(yè)第72頁(yè)第73頁(yè)第74頁(yè)第75頁(yè)第76頁(yè)第77頁(yè)第78頁(yè)第79頁(yè)第80頁(yè)第81頁(yè)第82頁(yè)第83頁(yè)第84頁(yè)第85頁(yè)第86頁(yè)第87頁(yè)第88頁(yè)第89頁(yè)第90頁(yè)第91頁(yè)第92頁(yè)第93頁(yè)第94頁(yè)第95頁(yè)第96頁(yè)第97頁(yè)第98頁(yè)第99頁(yè)第100頁(yè)第101頁(yè)第102頁(yè)第103頁(yè)第104頁(yè)第105頁(yè)第106頁(yè)第107頁(yè)第108頁(yè)第109頁(yè)第110頁(yè)第111頁(yè)第112頁(yè)第113頁(yè)第114頁(yè)第115頁(yè)第116頁(yè)第117頁(yè)第118頁(yè)第119頁(yè)第120頁(yè)第121頁(yè)第122頁(yè)第123頁(yè)第124頁(yè)第125頁(yè)第126頁(yè)第127頁(yè)第128頁(yè)第129頁(yè)第130頁(yè)第131頁(yè)第132頁(yè)第133頁(yè)第134頁(yè)第135頁(yè)第136頁(yè)第137頁(yè)第138頁(yè)第139頁(yè)第140頁(yè)第141頁(yè)第142頁(yè)第143頁(yè)第144頁(yè)第145頁(yè)第146頁(yè)第147頁(yè)第148頁(yè)第149頁(yè)第150頁(yè)第151頁(yè)第152頁(yè)第153頁(yè)第154頁(yè)第155頁(yè)第156頁(yè)第157頁(yè)當(dāng)前第158頁(yè)第159頁(yè)第160頁(yè)第161頁(yè)第162頁(yè)第163頁(yè)第164頁(yè)第165頁(yè)第166頁(yè)第167頁(yè)第168頁(yè)第169頁(yè)第170頁(yè)第171頁(yè)第172頁(yè)第173頁(yè)
Data Sheet
July 2000
DSP16210 Digital Signal Processor
158
DRAFT COPY
Lucent Technologies Inc.
Timing Characteristics and Requirements
(continued)
PHIF16
(continued)
Note:
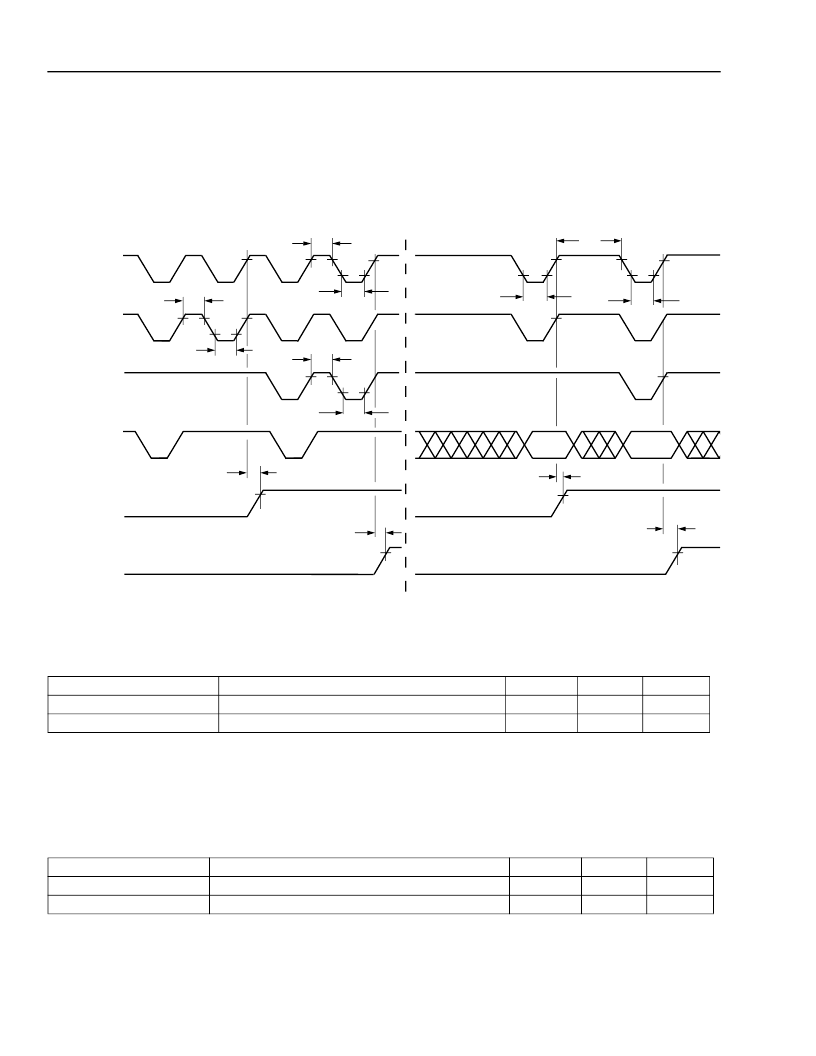
This diagram assumes an 8-bit external interface.
Figure 43. PHIF16 MotorolaMode Signaling (Pulse Period and Flags) Timing Diagram
Table 115. Timing Characteristics for PHIF16 MotorolaMode Signaling (Pulse Period and Flags)
Abbreviated Reference
t53
t54
Parameter
Min
—
—
Max
15
15
Unit
ns
ns
An input/output transaction is initiated by PCSN or PDS going low, whichever comes last. For example, t53 and t54 should be referenced to
PDS going low, if PDS goes low after PCSN. An input/output transaction is completed by PCSN or PDS going high, whichever comes first.
All requirements referenced to PCSN should be referenced to PDS, if PDS is the controlling signal. PRWN should never be used to initiate
or complete a transaction.
PDS is programmable to be active-high or active-low. It is shown active-low in Figure 43. POBE and PIBF may be programmed to be the
opposite logic levels shown in the diagram. t53 and t54 apply to the inverted levels as well as those shown.
PCSN/PDS
to POBE
(high to high)
PCSN/PDS
to PIBF
(high to high)
Table 116. Timing Requirements for PHIF16 MotorolaMode Signaling (Pulse Period and Flags)
Abbreviated Reference
t55
t56
Parameter
Min
20
20
Max
—
—
Unit
ns
ns
PCSN/PDS/PRWN Pulse Width (high to low)
PCSN/PDS/PRWN Pulse Width (low to high)
5-4039(F).a
PDS
PRWN
V
IH
–
V
IL
–
t55
t56
t55
t56
t55
t56
PCSN
t53
t54
16-bit READ
8-bit WRITE
PBSEL
POBE
PIBF
t54
t56
t56
t55
t53
8-bit READ
16-bit WRITE
V
IH
–
V
IL
–
V
IH
–
V
IL
–
V
OH
–
V
OL
–
V
OH
–
V
OL
–
V
OH
–
V
OL
–
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| DSP1627 | TVS 400W 6.5V BIDIRECT SMA |
| DSP1629 | TVS 400W 64V UNIDIRECT SMA |
| DSP16410C | TVS 400W 7.0V UNIDIRECT SMA |
| DSP16410 | 16-bit fixed point DSP with Flash |
| DSP25-16AR | Phase-leg Rectifier Diode |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| DSP1627 | 制造商:AGERE 制造商全稱:AGERE 功能描述:DSP1627 Digital Signal Processor |
| DSP1627F32K10IR | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:DSP|16-BIT|CMOS|QFP|100PIN|PLASTIC |
| DSP1627F32K10IT | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:DSP|16-BIT|CMOS|QFP|100PIN|PLASTIC |
| DSP1627F32K11I | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:16-Bit Digital Signal Processor |
| DSP1627F32K11IR | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:DSP|16-BIT|CMOS|QFP|100PIN|PLASTIC |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。