- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄358635 > 38D5 (Renesas Technology Corp.) SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER PDF資料下載
參數(shù)資料
| 型號: | 38D5 |
| 廠商: | Renesas Technology Corp. |
| 英文描述: | SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER |
| 中文描述: | 單芯片8位CMOS微機 |
| 文件頁數(shù): | 41/141頁 |
| 文件大小: | 2027K |
| 代理商: | 38D5 |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁當前第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁第64頁第65頁第66頁第67頁第68頁第69頁第70頁第71頁第72頁第73頁第74頁第75頁第76頁第77頁第78頁第79頁第80頁第81頁第82頁第83頁第84頁第85頁第86頁第87頁第88頁第89頁第90頁第91頁第92頁第93頁第94頁第95頁第96頁第97頁第98頁第99頁第100頁第101頁第102頁第103頁第104頁第105頁第106頁第107頁第108頁第109頁第110頁第111頁第112頁第113頁第114頁第115頁第116頁第117頁第118頁第119頁第120頁第121頁第122頁第123頁第124頁第125頁第126頁第127頁第128頁第129頁第130頁第131頁第132頁第133頁第134頁第135頁第136頁第137頁第138頁第139頁第140頁第141頁
Rev.3.01
REJ03B0158-0301
Aug 08, 2007
Page 41 of 134
38D5 Group
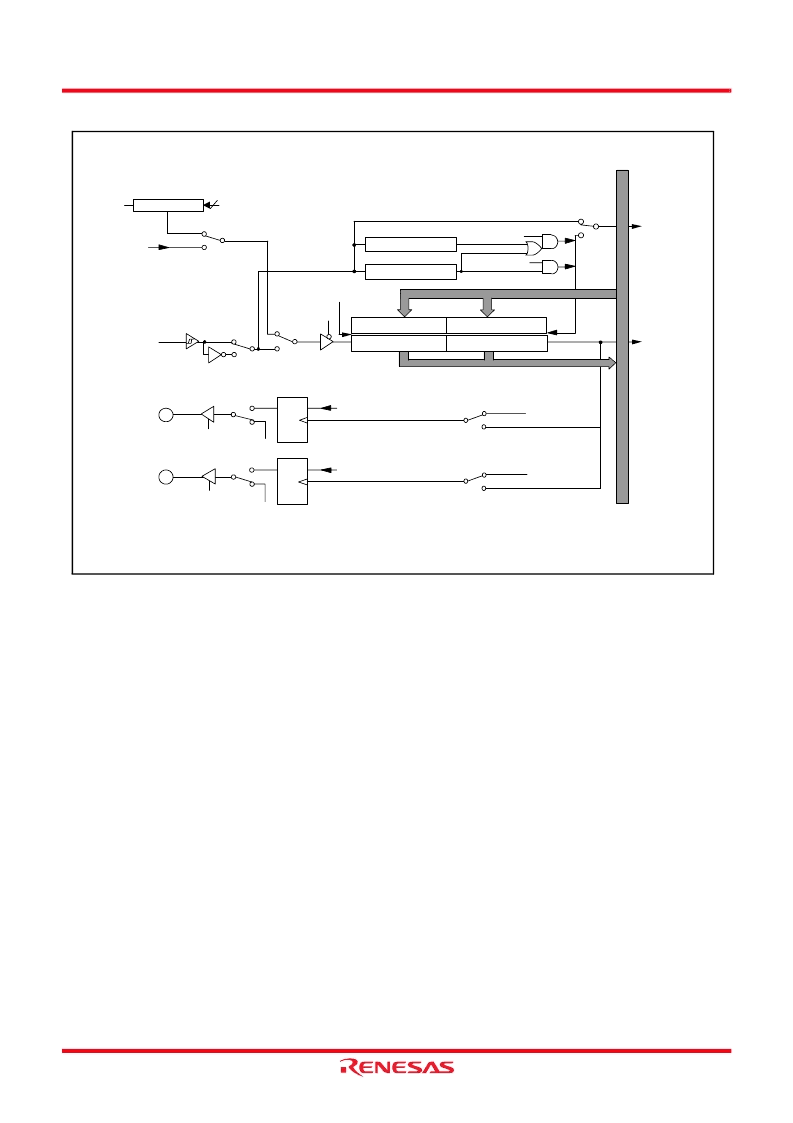
Fig. 31 Block diagram of Timer Y
Timer Y
Timer Y is a 16-bit timer. The timer Y count source can be
selected by setting the timer Y mode register. X
CIN
can be
selected as the count source.
When X
CIN
is selected as the count
source, counting can be performed regardless of X
IN
oscillation
or on-chip oscillator oscillation.
Four operating modes can be selected for timer Y by the timer Y
mode register. Also, the real time port can be controlled.
(1) Timer Mode
The timer Y count source can be selected by setting the timer Y
mode register.
(2) Period Measurement Mode
The interrupt request is generated at rising or falling edge of
CNTR
1
pin input signal. Simultaneously, the value in timer Y
latch is reloaded in timer Y and timer Y continues counting.
Except for that, this mode operates just as in the timer mode.
The timer value just before the reloading at rising or falling of
CNTR
1
pin input is retained until the timer Y is read once after
the reload.
The rising or falling timing of CNTR
1
pin input is found by
CNTR
1
interrupt. When using this mode, set the port sharing the
CNTR
1
pin to input mode.
(3) Event Counter Mode
The timer counts signals input through the CNTR
1
pin.
Except for that, this mode operates just as in the timer mode.
When using this mode, set the port sharing the CNTR
1
pin to
input mode.
(4) Pulse Width HL Continuously Measurement Mode
The interrupt request is generated at both rising and falling edges
of CNTR
1
pin input signal. Except for that, this mode operates
just as in the period measurement mode. When using this mode,
set the port sharing the CNTR
1
pin to input mode.
(5) Real Time Port Control
When the real time port function is valid, data for the real time
port is output from ports P5
0
and P5
1
each time the timer Y
underflows.(However, if the real time port control bit is changed
from “0” to “1” after the data for real time port is set, data is
output independent of the timer Y operation.) When the data for
the real time port is changed while the real time port function is
valid, the changed data is output at the next underflow of timer Y.
Before using this function, set the P5
0
and P5
1
port direction
registers to output.
Data bus
Real time p“1”
Real time port 2
control bit
Q D
Latch
Q D
Latch
P5
1
direction
register
P5
1
latch
RTP
1
data for real
time port
P5
0
direction
register
P5
0
latch
RTP
0
data for real
time port
“1”
Timer Y (low-order) latch (8) Timer Y (high-order) latch (8)
“0”
1
active
CNTR
“10”
P5
1
/RTP
1
/AN
1
P5
0
/RTP
0
/AN
0
CNTR
1
Falling edge detection
Period measurement
mode
Timer Y
interrupt request
Pulse width HL continuous
measurement mode
Timer Y operating
mode bits
CNTR
1
interrupt request
Rising edge detection
Count source selection bit
Xc
IN
“1”
φ
SOURCE
Real time port 2 control bit
“0”
Timer Y mode register
Timer Y operating mode bits
“00”, “01”, “10”
“00”, “01”, “11”
“1”
“0”
“0”
“1”
“11”
“0”
Timer Y write control bit
Timer stop bit
“0”
“1”
Timer Y mode register
write signal
Real time port 1 control bit
Timer Y (low-order)(8)
Timer Y (high-order)(8)
Frequency divider
Timer Y dividing frequency selection bit
2
Note1
:
φ
SOURCE indicates the followings:
X
IN
input in the frequency/2, 4, or 8 mode
On-chip oscillator divided by 4 in the on-chip oscillator mode
Sub-clock in the low-speed mode
(1)
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| 38F1222 | 300mA LDO Linear Regulators with Internal Microprocessor Reset Circuit |
| TA5M | STECKER DIN MINI 5POL |
| 70B5031 | KUPPLUNG DIN MINI 5POL |
| 39-26-3050 | 300mA LDO Linear Regulators with Internal Microprocessor Reset Circuit |
| 390KD05JX | 11 to 460 Volts Varistor 0.7 to 29 Joule |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| 38D5_07 | 制造商:RENESAS 制造商全稱:Renesas Technology Corp 功能描述:Standard Characteristics Example |
| 38D5_08 | 制造商:RENESAS 制造商全稱:Renesas Technology Corp 功能描述:SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER |
| 38D511G015FE6AD | 制造商:Sprague/Vishay 功能描述:AL015X751 |
| 38D5-FMV | 制造商:RENESAS 制造商全稱:Renesas Technology Corp 功能描述:Standard Characteristics (Flash Memory Version) |
| 38DDP11B11M1QT | 功能描述:SWITCH PUSH DPDT,O-N-O,N,SL,LF , 制造商:grayhill inc. 系列:* 零件狀態(tài):在售 標準包裝:1 |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。