- 您現(xiàn)在的位置:買(mǎi)賣(mài)IC網(wǎng) > PDF目錄369945 > P8XC591 (NXP Semiconductors N.V.) HiRel FPGA, Low-Power 1.0?? CMOS Technology PDF資料下載
參數(shù)資料
| 型號(hào): | P8XC591 |
| 廠商: | NXP Semiconductors N.V. |
| 英文描述: | HiRel FPGA, Low-Power 1.0?? CMOS Technology |
| 中文描述: | 單芯片8 - CAN控制器位微控制器 |
| 文件頁(yè)數(shù): | 34/160頁(yè) |
| 文件大?。?/td> | 601K |
| 代理商: | P8XC591 |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)第31頁(yè)第32頁(yè)第33頁(yè)當(dāng)前第34頁(yè)第35頁(yè)第36頁(yè)第37頁(yè)第38頁(yè)第39頁(yè)第40頁(yè)第41頁(yè)第42頁(yè)第43頁(yè)第44頁(yè)第45頁(yè)第46頁(yè)第47頁(yè)第48頁(yè)第49頁(yè)第50頁(yè)第51頁(yè)第52頁(yè)第53頁(yè)第54頁(yè)第55頁(yè)第56頁(yè)第57頁(yè)第58頁(yè)第59頁(yè)第60頁(yè)第61頁(yè)第62頁(yè)第63頁(yè)第64頁(yè)第65頁(yè)第66頁(yè)第67頁(yè)第68頁(yè)第69頁(yè)第70頁(yè)第71頁(yè)第72頁(yè)第73頁(yè)第74頁(yè)第75頁(yè)第76頁(yè)第77頁(yè)第78頁(yè)第79頁(yè)第80頁(yè)第81頁(yè)第82頁(yè)第83頁(yè)第84頁(yè)第85頁(yè)第86頁(yè)第87頁(yè)第88頁(yè)第89頁(yè)第90頁(yè)第91頁(yè)第92頁(yè)第93頁(yè)第94頁(yè)第95頁(yè)第96頁(yè)第97頁(yè)第98頁(yè)第99頁(yè)第100頁(yè)第101頁(yè)第102頁(yè)第103頁(yè)第104頁(yè)第105頁(yè)第106頁(yè)第107頁(yè)第108頁(yè)第109頁(yè)第110頁(yè)第111頁(yè)第112頁(yè)第113頁(yè)第114頁(yè)第115頁(yè)第116頁(yè)第117頁(yè)第118頁(yè)第119頁(yè)第120頁(yè)第121頁(yè)第122頁(yè)第123頁(yè)第124頁(yè)第125頁(yè)第126頁(yè)第127頁(yè)第128頁(yè)第129頁(yè)第130頁(yè)第131頁(yè)第132頁(yè)第133頁(yè)第134頁(yè)第135頁(yè)第136頁(yè)第137頁(yè)第138頁(yè)第139頁(yè)第140頁(yè)第141頁(yè)第142頁(yè)第143頁(yè)第144頁(yè)第145頁(yè)第146頁(yè)第147頁(yè)第148頁(yè)第149頁(yè)第150頁(yè)第151頁(yè)第152頁(yè)第153頁(yè)第154頁(yè)第155頁(yè)第156頁(yè)第157頁(yè)第158頁(yè)第159頁(yè)第160頁(yè)
2000 Jul 26
34
Philips Semiconductors
Preliminary Specification
Single-chip 8-bit microcontroller with CAN controller
P8xC591
12.5.2
M
ODE
R
EGISTER
(MOD)
The contents of the Mode Register are used to change the behaviour of the CAN controller. Bits may be set or reset by
the CPU that uses the Mode Register as a read / write memory. Reserved Bits are read as “0”.
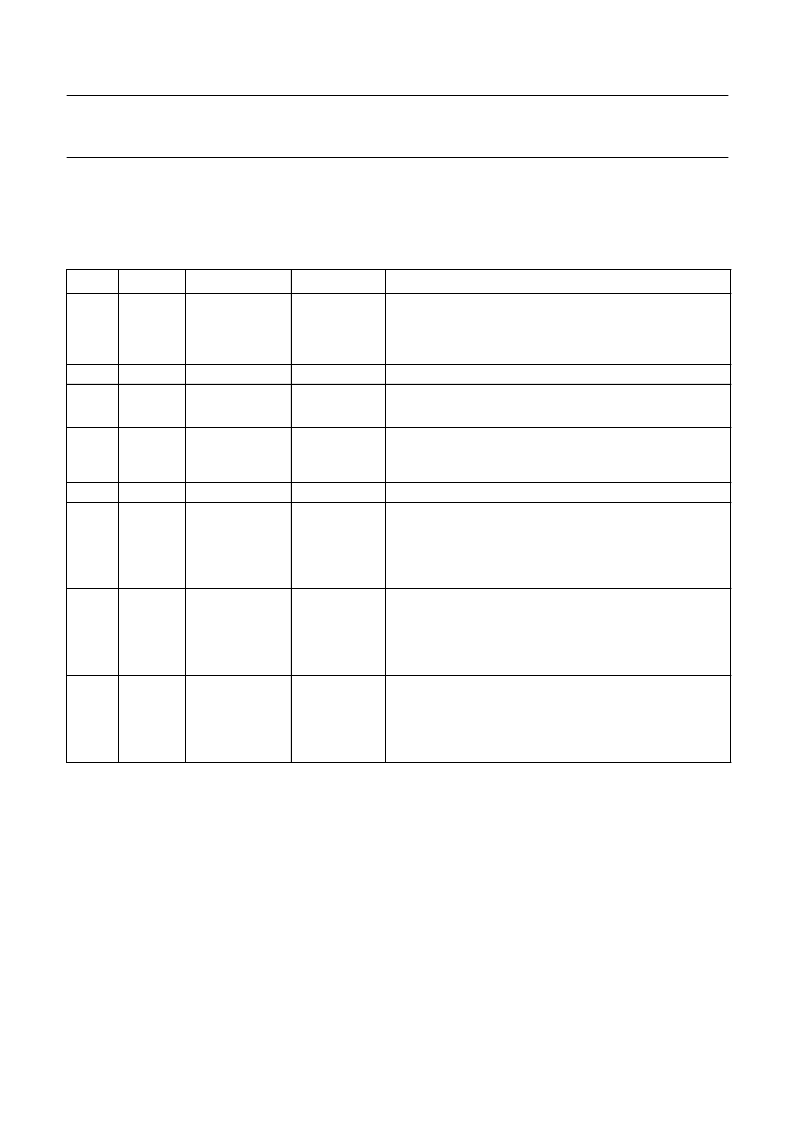
Table 13
Mode Register (MOD) CAN Addr. 0 bit interpretation
Notes
1.
A write access to the bits MOD.1, MOD.2, MOD.5, MOD.6 and MOD.7 is possible only, if the Reset Mode is entered
previously.
The PeliCAN Block will enter Sleep Mode, if the Sleep Mode bit is set ‘1’ (sleep), there is no bus activity and no
interrupt is pending. Setting of SM with at least one of the previously mentioned exceptions valid will result in a
wake-up interrupt. The CAN controller will wake up if SM is set LOW (wake-up) or there is bus activity. On wake-up,
a Wake-up Interrupt is generated. A sleeping CAN controller which wakes up due to bus activity will not be able to
receive this message until it detects 11 consecutive recessive bits (Bus-Free sequence). Note that setting of SM is
not possible in Reset Mode. After clearing of Reset Mode, setting of SM is possible first, when Bus-Free is detected
again.
This mode of operation forces the CAN controller to be error passive. Message Transmission is not possible. The
Listen Only Mode can be used e.g. for software driven bit rate detection and “hot plugging”.
2.
3.
BIT
SYMBOL
NAME
VALUE
FUNCTION
MOD.7
TM
Test Mode;
Note 1
1 (activated)
The TXDC pin will reflect the bit, detected on RXDC pin, with
the next positive edge of the system clock. The RPM bit has
no influence within this mode.
0 (disabled)
1 (high active)
MOD.6
MOD.5
RIPM
RPM
Reserved.
Receive Polarity
Mode
RXD inputs are active high (dominant = 1).
0 (low active)
1 (high active))
RXD inputs are active low (dominant = 0).
The CAN controller enters Sleep Mode if no CAN interrupt is
pending and there is no bus activity.
MOD.4
SM
Sleep Mode;
Note 2
0 (low active)
1 (self test)
MOD.3
MOD.2
reserved
Self Test Mode;
Note 1
In this mode a full node test is possible without any other
active node on the bus using the Self Reception Request
command. The CAN controller will perform a successful
transmission, even if there is no acknowledge received.
An acknowledge is required for successful transmission.
In this mode the CAN would give no acknowledge to the
CAN bus, even if a message is received successfully. No
active error flags are driven to the bus. The error counters
are stopped at the current value.
Normal communication.
Setting the Reset Mode bit results in aborting the current
transmission/reception of a message and entering the Reset
Mode.
On the’1’-to-’0’ transition of the Reset Mode bit, the CAN
controller returns to the Operating Mode.
STM
0 (normal)
1 (reset)
MOD.1
LOM
Listen Only
Mode; Notes 1
and 3
0 (normal)
1 (reset)
MOD.0
RM
Reset Mode;
Note 4
0 (normal)
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| P90CE201 | 16-bit microcontroller |
| P90CE201AEB | 16-bit microcontroller |
| P9217 | PbS photoconductive detector |
| P930 | CdS photoconductive cell |
| PA025XSB | This technical specification applies to 2.5inch color TFT-LCD panel. |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| P8XC592 | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:8-bit microcontroller with on-chip CAN |
| P8XCE598 | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:8-bit microcontroller with on-chip CAN |
| P8XCL580HFH | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Low voltage 8-bit microcontrollers with UART, I2C-bus and ADC |
| P8XCL580HFT | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Low voltage 8-bit microcontrollers with UART, I2C-bus and ADC |
| P8Z77 DELUXE | 制造商:Asus 功能描述:P8Z77-V Deluxe ATX Motherboard |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。