- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄370961 > M44C090-H (ATMEL CORP) Low-Current Microcontroller for Wireless Communication PDF資料下載
參數(shù)資料
| 型號(hào): | M44C090-H |
| 廠商: | ATMEL CORP |
| 元件分類: | 微控制器/微處理器 |
| 英文描述: | Low-Current Microcontroller for Wireless Communication |
| 中文描述: | 4-BIT, MROM, 4 MHz, MICROCONTROLLER, PDSO20 |
| 封裝: | SSO-20 |
| 文件頁數(shù): | 9/63頁 |
| 文件大小: | 503K |
| 代理商: | M44C090-H |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁當(dāng)前第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁
M44C890
M44C090
Rev.A4, 14-Dec-01
9 (63)
2.2.4
ALU
CCR
TOS
–
2
TOS
–
3
TOS
–
4
TOS
–
1
94 8977
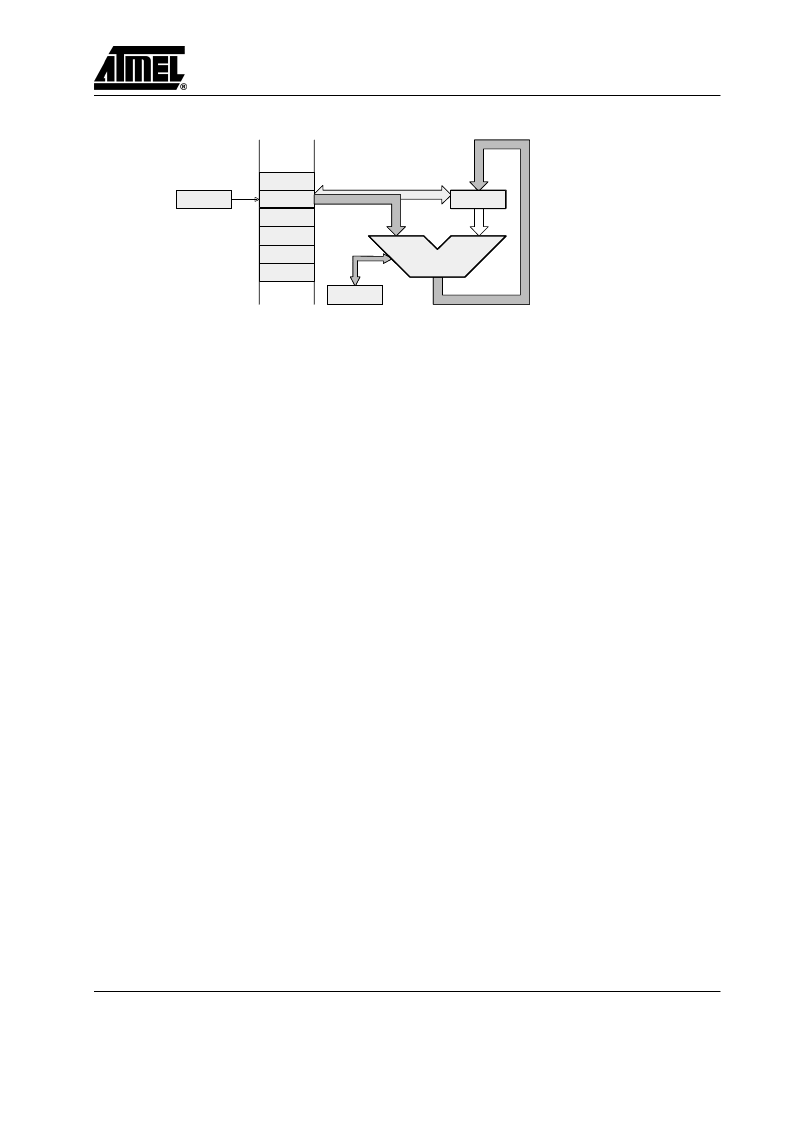
Figure 7. ALU zero-address operations
The 4-bit ALU performs all the arithmetic, logical, shift
and rotate operations with the top two elements of the
expression stack (TOS and TOS
–
1) and returns the result
to the TOS. The ALU operations affect the carry/borrow
and branch flag in the condition code register (CCR).
2.2.5
I/O Bus
The I/O ports and the registers of the peripheral modules
are I/O mapped. All communication between the core and
the on-chip peripherals takes place via the I/O bus and the
associated I/O control. With the MARC4 IN and OUT
instructions the I/O bus allows a direct read or write
access to one of the 16 primary I/O addresses. More about
the I/O access to the on-chip peripherals is described in
the section
”
Peripheral Modules
”
. The I/O bus is internal
and is not accessible by the customer on the final micro-
controller device, but it is used as the interface for the
MARC4 emulation (see also the section
”
Emulation
”
).
2.2.6
Instruction Set
The MARC4 instruction set is optimized for the high level
programming language qFORTH. Many MARC4
instructions are qFORTH words. This enables the
compiler to generate a fast and compact program code.
The CPU has an instruction pipeline allowing the
controller to prefetch an instruction from ROM at the
same time as the present instruction is being executed.
The MARC4 is a zero address machine, the instructions
containing only the operation to be performed and no
source or destination address fields. The operations are
implicitly performed on the data placed on the stack.
There are one and two byte instructions which are
executed within 1 to 4 machine cycles. A MARC4
machine cycle is made up of two system clock
cycles (SYSCL). Most of the instructions are only one
byte long and are executed in a single machine cycle. For
more information refer to the
”
MARC4 Programmer
’
s
Guide
”
.
2.2.7
Interrupt Structure
The MARC4 can handle interrupts with eight different
priority levels. They can be generated from the internal
and external interrupt sources or by a software interrupt
from the CPU itself. Each interrupt level has a hard-wired
priority and an associated vector for the service routine in
the ROM (see table 2). The programmer can postpone the
processing of interrupts by resetting the interrupt enable
flag (I) in the CCR. An interrupt occurrence will still be
registered, but the interrupt routine only started after the
I flag is set. All interrupts can be masked, and the priority
individually software configured by programming the
appropriate control register of the interrupting module.
(see section
”
Peripheral Modules
”
).
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| M44C890 | Low-Current Microcontroller for Wireless Communication |
| M44C890-H | Low-Current Microcontroller for Wireless Communication |
| M4N25 | 6-Pin DIP Optoisolators Transistor Output |
| M4N26 | 6-Pin DIP Optoisolators Transistor Output |
| M4N37 | Header, Vertical Friction Lock; No. of Contacts:3; Pitch Spacing:2.54mm; No. of Rows:1; Gender:Header; Series:6410; Body Material:PA Polyamide (Nylon); Current Rating:4A; Voltage Rating:250V RoHS Compliant: Yes |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| M44C890 | 制造商:ATMEL 制造商全稱:ATMEL Corporation 功能描述:Low-Current Microcontroller for Wireless Communication |
| M44C890-H | 制造商:ATMEL 制造商全稱:ATMEL Corporation 功能描述:Low-Current Microcontroller for Wireless Communication |
| M44S05K4F1 | 功能描述:汽車連接器 MX44 Terminals RoHS:否 制造商:Amphenol SINE Systems 產(chǎn)品:Contacts 系列:ATP 位置數(shù)量: 型式:Female 安裝風(fēng)格: 端接類型: 觸點(diǎn)電鍍:Nickel |
| M44T332538880MHZ | 制造商:MEC 功能描述: |
| M44T3338880MHZ | 制造商:MEC 功能描述: |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。