- 您現(xiàn)在的位置:買賣IC網 > PDF目錄379343 > SAF7847HL (NXP SEMICONDUCTORS) One chip CD audio device with integrated MP3-WMA decoder PDF資料下載
參數(shù)資料
| 型號: | SAF7847HL |
| 廠商: | NXP SEMICONDUCTORS |
| 元件分類: | 顏色信號轉換 |
| 英文描述: | One chip CD audio device with integrated MP3-WMA decoder |
| 中文描述: | COLOR SIGNAL DECODER, PQFP144 |
| 封裝: | 20 X 20 MM, 1.40 MM HEIGHT, SOT486-1, MS-026, PLASTIC, QFP-144 |
| 文件頁數(shù): | 55/93頁 |
| 文件大?。?/td> | 396K |
| 代理商: | SAF7847HL |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁當前第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁第64頁第65頁第66頁第67頁第68頁第69頁第70頁第71頁第72頁第73頁第74頁第75頁第76頁第77頁第78頁第79頁第80頁第81頁第82頁第83頁第84頁第85頁第86頁第87頁第88頁第89頁第90頁第91頁第92頁第93頁
SAF784X_2
NXP B.V. 2008. All rights reserved.
Product data sheet
Rev. 02 — 9 May 2008
55 of 93
NXP Semiconductors
SAF784x
One chip CD audio device with integrated MP3/WMA decoder
6.6.4.3
Dropout detection
This detector can be influenced by one parameter (CA_drop). Focus will be lost and the
integrator of the PID will hold if the CA signal drops below this programmable absolute
CA level. When focus is lost it is assumed, initially, to be caused by a black dot.
6.6.4.4
Focus loss detection and fast restart
Whenever focus is lost for longer than approximately 3 ms, it is assumed that the focus
point is lost. A fast restart procedure is initiated which is capable of restarting the focus
loop within 200 ms to 300 ms depending on the programmed coefficients of the
microcontroller.
6.6.4.5
Focus loop gain switching
The gain of the focus control loop (foc_gain) can be multiplied by a factor of 2 or divided
by a factor of 2 during normal operation. The integrator value of the PID is corrected
accordingly. The differentiating (foc_pole_lead) action of the PID can be switched at the
same time as the gain switching is performed.
6.6.4.6
Focus automatic gain control loop
The loop gain of the focus control loop can be corrected automatically to eliminate
tolerances in the focus loop. This gain control injects a signal into the loop which is used to
correct the loop gain. Since this decreases the optimum performance, the gain control
should only be activated for a short time (for example, when starting a new disc).
6.6.5
Radial servo system
6.6.5.1
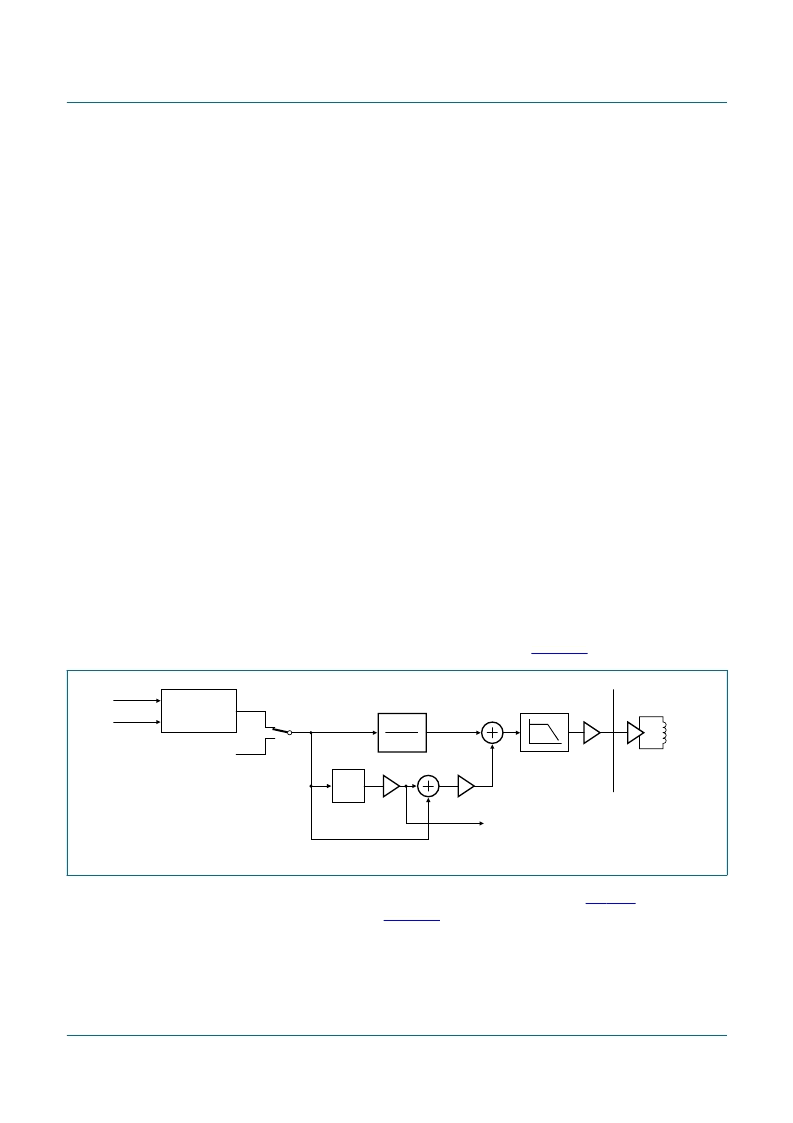
Radial PID - on-track mode
When the radial servo is in On-track mode (normal play mode), a PID controller is active
for the fast actuator, while the sledge is steered using either a PI or pulsed-mode system.
A simplified diagram of the radial PID system is given in
Figure 32
.
An explanation of the different radial PID parameters are given in
Table 13
. The system
frequency response is given in
Figure 33
.
Fig 32. Block diagram of radial PID system
001aag343
j
ω
/
ω
3
1 + j
ω
/
ω
3
ω
4
scaled
radial error
satellite 1
satellite 2
internal
sledge error signal
external
I
P
G
radial
actuator
G
E
D
zero on
defect
or drop out
1 / j
ω
ω
1
ω
2
/
ω
3
NORMALIZER
相關PDF資料 |
PDF描述 |
|---|---|
| SAF7849HL | One chip CD audio device with integrated MP3-WMA decoder |
| SB-015 | GMR Digital Sensor Evaluation Kit |
| SB10100F | ISOLATION SCHOTTKY BARRIER RECTIFIERS |
| SB1040F | ISOLATION SCHOTTKY BARRIER RECTIFIERS |
| SB1080F | ISOLATION SCHOTTKY BARRIER RECTIFIERS |
相關代理商/技術參數(shù) |
參數(shù)描述 |
|---|---|
| SAF7847HL/M201,557 | 功能描述:音頻 DSP 1 chip CD Audio Dev w/Integrated decoder RoHS:否 制造商:Texas Instruments 工作電源電壓: 電源電流: 工作溫度范圍: 安裝風格: 封裝 / 箱體: 封裝:Tube |
| SAF7849HL/M245,557 | 功能描述:音頻 DSP IC AUD DECODER RoHS:否 制造商:Texas Instruments 工作電源電壓: 電源電流: 工作溫度范圍: 安裝風格: 封裝 / 箱體: 封裝:Tube |
| SAF7849HL/M295,557 | 功能描述:音頻 DSP IC AUD DECODER RoHS:否 制造商:Texas Instruments 工作電源電壓: 電源電流: 工作溫度范圍: 安裝風格: 封裝 / 箱體: 封裝:Tube |
| SAF7860HL/M2,557 | 制造商:NXP Semiconductors 功能描述:DSP |
| SAF82520PVB2 | 制造商:SIEMENS 功能描述:New |
發(fā)布緊急采購,3分鐘左右您將得到回復。