- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄359133 > MC33976 (飛思卡爾半導(dǎo)體(中國)有限公司) Dual Gauge Driver with Configurable Response Time(帶可設(shè)置響應(yīng)時間的雙標(biāo)尺驅(qū)動器) PDF資料下載
參數(shù)資料
| 型號: | MC33976 |
| 廠商: | 飛思卡爾半導(dǎo)體(中國)有限公司 |
| 英文描述: | Dual Gauge Driver with Configurable Response Time(帶可設(shè)置響應(yīng)時間的雙標(biāo)尺驅(qū)動器) |
| 中文描述: | 雙計驅(qū)動器,可配置的響應(yīng)時間(帶可設(shè)置響應(yīng)時間的雙標(biāo)尺驅(qū)動器) |
| 文件頁數(shù): | 30/40頁 |
| 文件大小: | 5332K |
| 代理商: | MC33976 |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁當(dāng)前第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁
Analog Integrated Circuit Device Data
Freescale Semiconductor
30
33976
FUNCTIONAL DEVICE OPERATION
STATE MACHINE
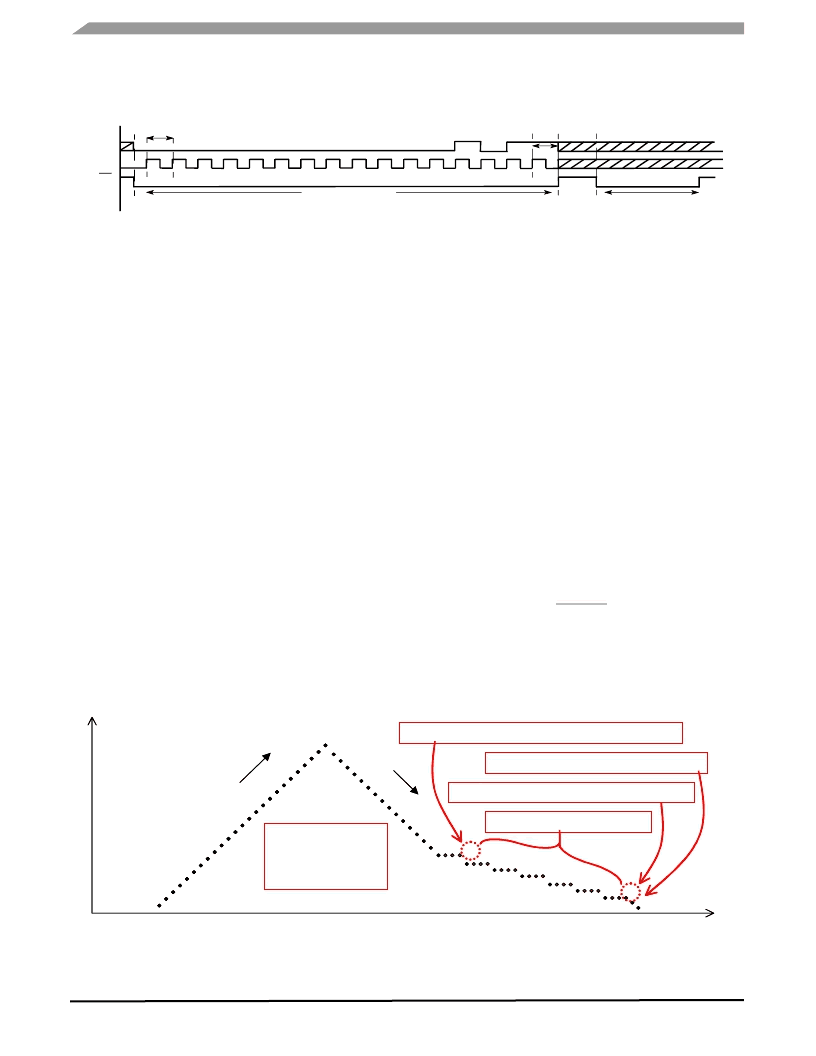
Figure 9. Gauge Enable and Clock Calibration Example
Some applications may require a guaranteed maximum
pointer velocity and acceleration. Guaranteeing these
maximums requires that the nominal internal clock frequency
falls below 1.0 MHz. The frequency range of the calibrated
clock will always be below 1.0 MHz if PECCR bit PE4 is
logic [0] prior to initiating a calibration command, followed by
an 8.0
μ
s reference pulse. The frequency will be centered at
1.0 MHz if bit D4 is logic [1].
The
33976 can be fooled into calibrating faster or slower
than the optimal frequency by sending a calibration pulse
longer or shorter than the intended 8.0
μ
s. As long as the
calibration divisor remains between 4 and 15 there will be no
clock calibration flag. For applications requiring a slower
calibrated clock — e.g., a motor designed with a gear ratio of
120:1 (8 microsteps/deg) — he user will have to provide a
longer calibration pulse. The device allows a SPI-selectable
slowing of the internal oscillator, using the PECCR command,
so that the calibration divisor safely falls within the 4-to-15
range when calibrating with a longer time reference. For
example, for the 120:1 motor, the pulse would be 12
μ
s
instead of 8.0
μ
s. The result of this slower calibration results
in the longer step times necessary to generate pointer
movements meeting acceleration and velocity requirements.
The resolution of the pointer positioning decreases from
0.083 deg/microstep (180:1) to 0.125 deg/microstep (120:1)
while the pointer sweep range increases from approximately
340 degrees to over 500 degrees.
Note
Be aware that a fast calibration could result in
violations of the motor acceleration and velocity maximums,
resulting in missed steps.
Pointer Deceleration
Constant acceleration and deceleration of the pointer
produces relatively choppy movements when compared to
those of an air core gauge. Modifying the velocity position
ramp during deceleration can create the desired damped
movement. This modification is accomplished by adding
repetitive steps at several of the last velocity position step
values as the pointer decelerates. The 33976 allows the user
to tailor the response characteristics to the application with
three independent ramp characteristic variables. The RS,
HCP and HC variables can be used to change the slowest
velocity position steps, the number of Hold Counts, and the
number of ramp positions to which the Hold Counts apply.
More information is available in the RMPSEL description and
in the example shown in
Figure 10
. If the maximum
acceleration and deceleration of the pointer is desired, the
Hold Counts can be disabled dynamically by either writing a
logic [1] to the global Hold Count Disable bit, PECCR bit PE5,
or to the HE0 or HE1 bits of the POS0R or POS1R,
respectively.
Figure 10. Deceleration Ramp
D15
SI
SCLK
CS
PECCR Command
D0
8.0
μ
s Calibration Pulse
First Velocity w/ Hold Counts = HCP
×
8 + RS = 8 + 0 = 8
24
23
22
21
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
2
3
4
5
6
7
8
9
11
12
13
14
15
16
17
18
19
20
21
22
23
24
Position
= 0
POSITION
MICROSTEPS
HCP = 1
Initial Velocity Position = RS + 1 = 0 + 1 = 1
Last Velocity w/ Hold Counts = RS + 2 = 0 + 2 = 2
Hold Counts per Step = HC = 3
VELOCITY
Acceeae
Deceeae
For this example:
RS = 0
HC = 3
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| MC33984 | Dual Intelligent High-Current Self-Protected Silicon High-Side Switch (4.0 mOhm)(雙智能大電流帶自保護(hù)功能的硅高端開關(guān)(4mOhm)) |
| MC33989 | System Basis Chip with High Speed CAN Transceiver(帶高速CAN收發(fā)器的系統(tǒng)基片) |
| MC33990 | J-1850 SERIAL TRANSCEIVER(J-1850總線收發(fā)器) |
| MC33991 | Gauge Driver Integrated Circuit(標(biāo)尺驅(qū)動器集成電路) |
| MC33993 | Multiple Switch Detection Interface(多開關(guān)監(jiān)測接口) |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| MC33981ABHFK | 功能描述:電源開關(guān) IC - 配電 HF 4.0MOHM RDSON SWITCH RoHS:否 制造商:Exar 輸出端數(shù)量:1 開啟電阻(最大值):85 mOhms 開啟時間(最大值):400 us 關(guān)閉時間(最大值):20 us 工作電源電壓:3.2 V to 6.5 V 電源電流(最大值): 最大工作溫度:+ 85 C 安裝風(fēng)格:SMD/SMT 封裝 / 箱體:SOT-23-5 |
| MC33981ABHFKR2 | 功能描述:電源開關(guān) IC - 配電 HF 4.0MOHM RDSON SWITCH RoHS:否 制造商:Exar 輸出端數(shù)量:1 開啟電阻(最大值):85 mOhms 開啟時間(最大值):400 us 關(guān)閉時間(最大值):20 us 工作電源電壓:3.2 V to 6.5 V 電源電流(最大值): 最大工作溫度:+ 85 C 安裝風(fēng)格:SMD/SMT 封裝 / 箱體:SOT-23-5 |
| MC33981BHFK | 功能描述:電源開關(guān) IC - 配電 HF 4.0MOHM RDSON SWITCH RoHS:否 制造商:Exar 輸出端數(shù)量:1 開啟電阻(最大值):85 mOhms 開啟時間(最大值):400 us 關(guān)閉時間(最大值):20 us 工作電源電壓:3.2 V to 6.5 V 電源電流(最大值): 最大工作溫度:+ 85 C 安裝風(fēng)格:SMD/SMT 封裝 / 箱體:SOT-23-5 |
| MC33981BHFKR2 | 功能描述:電源開關(guān) IC - 配電 HF 4.0MOHM RDSON SWITCH RoHS:否 制造商:Exar 輸出端數(shù)量:1 開啟電阻(最大值):85 mOhms 開啟時間(最大值):400 us 關(guān)閉時間(最大值):20 us 工作電源電壓:3.2 V to 6.5 V 電源電流(最大值): 最大工作溫度:+ 85 C 安裝風(fēng)格:SMD/SMT 封裝 / 箱體:SOT-23-5 |
| MC33981BPNA | 功能描述:電源開關(guān) IC - 配電 VIPER RoHS:否 制造商:Exar 輸出端數(shù)量:1 開啟電阻(最大值):85 mOhms 開啟時間(最大值):400 us 關(guān)閉時間(最大值):20 us 工作電源電壓:3.2 V to 6.5 V 電源電流(最大值): 最大工作溫度:+ 85 C 安裝風(fēng)格:SMD/SMT 封裝 / 箱體:SOT-23-5 |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。