- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄371053 > MC68HC16Z1 (Motorola, Inc.) 16-Bit Modular Microcontroller(16位模塊化微控制器) PDF資料下載
參數(shù)資料
| 型號(hào): | MC68HC16Z1 |
| 廠商: | Motorola, Inc. |
| 英文描述: | 16-Bit Modular Microcontroller(16位模塊化微控制器) |
| 中文描述: | 16位微控制器模塊(16位模塊化微控制器) |
| 文件頁(yè)數(shù): | 4/20頁(yè) |
| 文件大?。?/td> | 210K |
| 代理商: | MC68HC16Z1 |
第1頁(yè)第2頁(yè)第3頁(yè)當(dāng)前第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)
MOTOROLA
4
AN1213/D
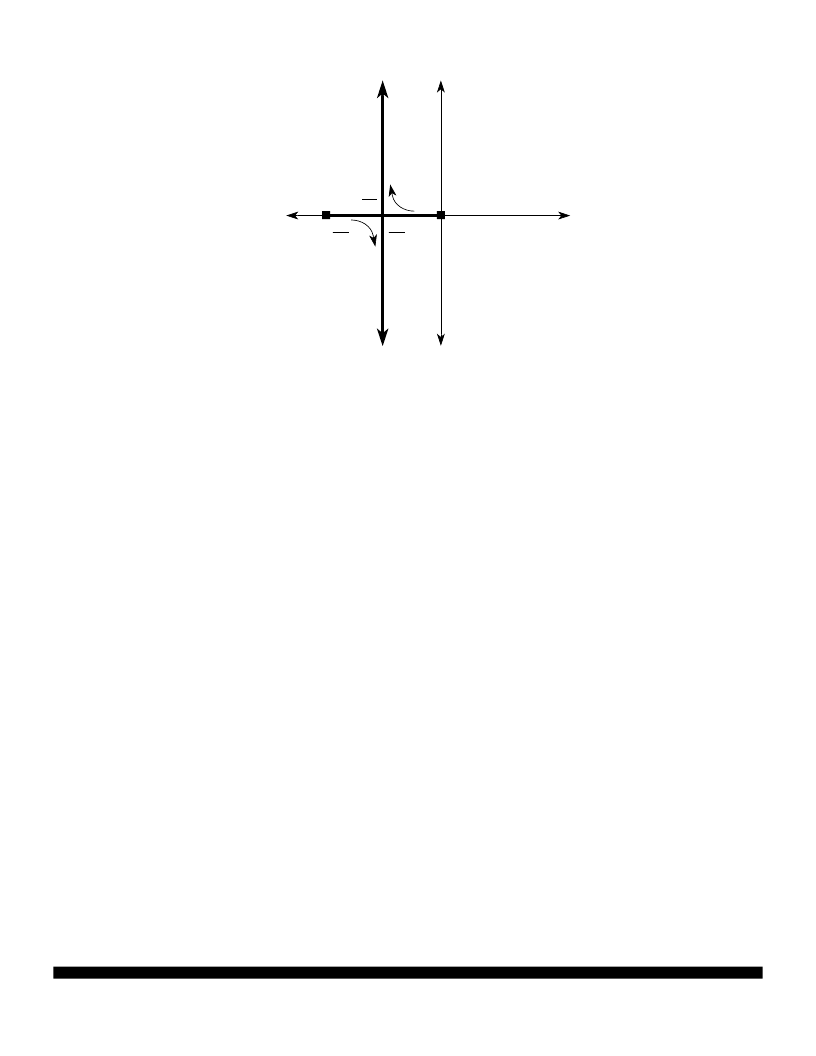
Figure 3 Effect of Varying I on Zeros
The D Term
The
Derivative
creasing the value of D from 0 to P
frequency zero takes on a value that can provide useful phase lead to offset the phase lag introduced by
poles elsewhere in the system.
term has its greatest effect on servo-loop damping and stability. As
2
/4I causes both zeros to move toward –2I/P. As this happens, the higher-
Figure 4
shows, in-
The design of the derivative portion of a PID controller is critical to system performance. In a position servo,
the feedback position signal is differentiated (either directly or indirectly) to create a signal proportional to
the output velocity. In systems that use a digital feedback mechanism (such as shaft encoders), velocity
information is also quantized, typically in encoder tics per sampling interval. At low velocities, the effect of
quantization on system performance is pronounced because each quantization step represents a large por-
tion of velocity signal amplitude. This can cause an audible scraping noise or unnecessary motor heating
at low speeds.
A velocity state observer can be used to mitigate low-speed quantization effects. The state observer uses
a software model of the load to synthesize a higher-resolution velocity signal. Each sample period, PID con-
troller output is input to the model, and the model generates an estimate of output position. The estimate is
compared to actual encoder position to generate an error value, which is used to refine the estimate for the
next sample period.
A simpler way to deal with this problem is to calculate the velocity information at a lower sampling frequency,
thus increasing the number of encoder tics per sampling interval for a given velocity. A similar technique is
discussed in the next section of this note.
The location of the differentiator in the feedback loop also affects performance. In
input is the error signal. Since the commanded input position signal is a component of the error signal, any
abrupt change in commanded position is differentiated as if it were feedback position, resulting in a “pop-
ping” effect at the filter output. An alternate topology can provide more satisfactory performance, as shown
in the next section.
Figure 1
, the differentiator
DELTA I ONAN1213
I = P2
4D
I = 0
–P
D
I = 0
I =
∞
– P
2D
I =
∞
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| MC68HC24 | Port Replacement Unit (PRU) |
| MC68HC24D | Port Replacement Unit (PRU) |
| MC68HC705J | Microcontrollers |
| MC68HC705K1 | 8-Bit Microcontroller Units (MCU).(8位微控制器) |
| MC68HC705KJ1 | 8-Bit Microcontroller Units (MCU).(8位微控制器) |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| MC68HC16Z1CAG | 制造商:Freescale Semiconductor 功能描述: |
| MC68HC16Z1CAG16 | 功能描述:16位微控制器 - MCU 16 BIT MCU 1K RAM RoHS:否 制造商:Texas Instruments 核心:RISC 處理器系列:MSP430FR572x 數(shù)據(jù)總線寬度:16 bit 最大時(shí)鐘頻率:24 MHz 程序存儲(chǔ)器大小:8 KB 數(shù)據(jù) RAM 大小:1 KB 片上 ADC:Yes 工作電源電壓:2 V to 3.6 V 工作溫度范圍:- 40 C to + 85 C 封裝 / 箱體:VQFN-40 安裝風(fēng)格:SMD/SMT |
| MC68HC16Z1CAG16 | 制造商:Freescale Semiconductor 功能描述:IC16-BIT MICROCONTROLLER |
| MC68HC16Z1CAG20 | 功能描述:16位微控制器 - MCU 16 BIT MCU 1K RAM RoHS:否 制造商:Texas Instruments 核心:RISC 處理器系列:MSP430FR572x 數(shù)據(jù)總線寬度:16 bit 最大時(shí)鐘頻率:24 MHz 程序存儲(chǔ)器大小:8 KB 數(shù)據(jù) RAM 大小:1 KB 片上 ADC:Yes 工作電源電壓:2 V to 3.6 V 工作溫度范圍:- 40 C to + 85 C 封裝 / 箱體:VQFN-40 安裝風(fēng)格:SMD/SMT |
| MC68HC16Z1CAG20 | 制造商:Freescale Semiconductor 功能描述:Microcontroller |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。