- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄376151 > MC1251A (Electronic Theatre Controls, Inc.) Advanced Brushless Motor Control Chipset PDF資料下載
參數(shù)資料
| 型號(hào): | MC1251A |
| 廠商: | Electronic Theatre Controls, Inc. |
| 英文描述: | Advanced Brushless Motor Control Chipset |
| 中文描述: | 先進(jìn)的無(wú)刷電機(jī)控制芯片組 |
| 文件頁(yè)數(shù): | 21/70頁(yè) |
| 文件大?。?/td> | 474K |
| 代理商: | MC1251A |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)當(dāng)前第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)第31頁(yè)第32頁(yè)第33頁(yè)第34頁(yè)第35頁(yè)第36頁(yè)第37頁(yè)第38頁(yè)第39頁(yè)第40頁(yè)第41頁(yè)第42頁(yè)第43頁(yè)第44頁(yè)第45頁(yè)第46頁(yè)第47頁(yè)第48頁(yè)第49頁(yè)第50頁(yè)第51頁(yè)第52頁(yè)第53頁(yè)第54頁(yè)第55頁(yè)第56頁(yè)第57頁(yè)第58頁(yè)第59頁(yè)第60頁(yè)第61頁(yè)第62頁(yè)第63頁(yè)第64頁(yè)第65頁(yè)第66頁(yè)第67頁(yè)第68頁(yè)第69頁(yè)第70頁(yè)
21
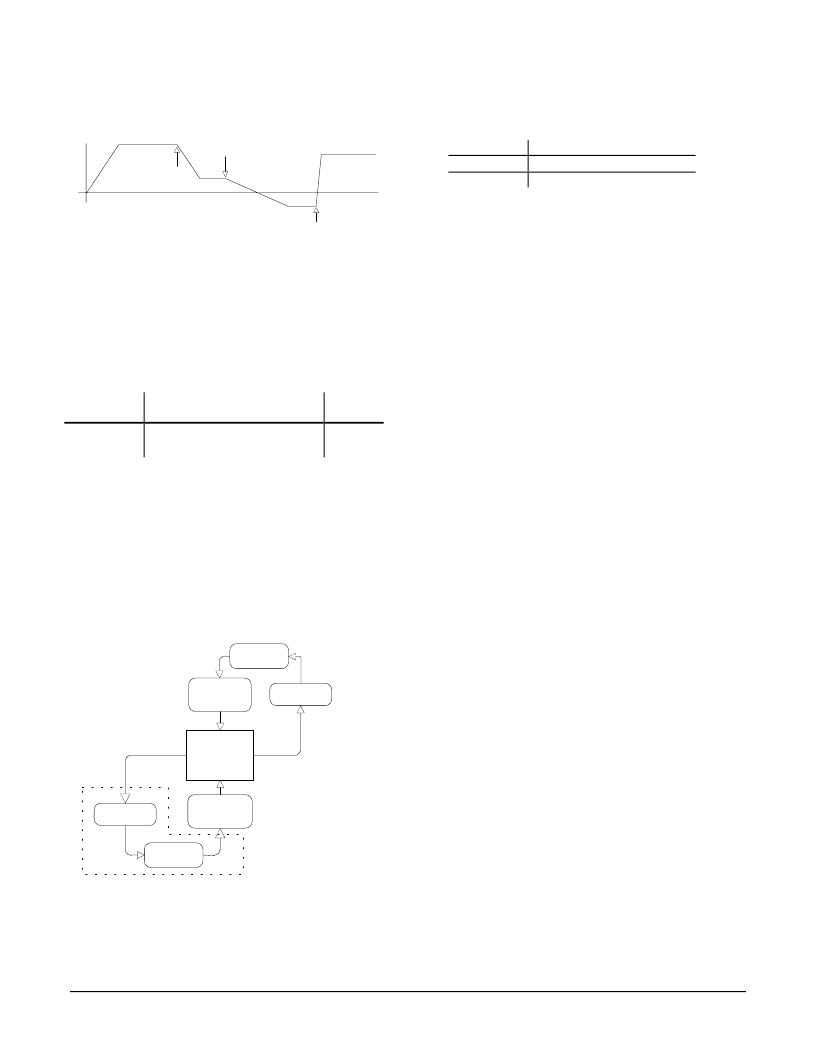
Example Velocity Contouring Mode
change
max velocity
change
acceleration
Vel.
Time
change max
velocity and
acceleration
There are no restrictions on switching the profile mode to velocity
contouring while the axis is in motion.
Electronic Gear
The following table summarizes the host specified profile parameters
for the electronic gear profile mode:
Profile
Parameter
Gear Ratio
Representation & Range
Units
signed 32 bits*(1/216 scaling)
-1,073,741,824 to +1,073,741,823
-
*for example to specify a gear ratio of +1.5 to 1 the value
1.5*65,536 is sent to the chipset (98,304). Alternatively to set
the gear ratio as -11.39 to 1 the value -11.39*65,536 is sent (-
746,455 dec. or fff49c29 hex.).
In this profile mode, the host specifies one parameter, the gear ratio.
The target position is generated by applying the specified gear ratio to
the current position of another axis, slaving the driven axis to the axis
providing the position input. The following figure shows the
arrangement for encoders and motor drives in a typical electronic
gearing application.
Master
Encoder
Slave
Encoder
Motor
Amplifier
MC1231A
Motor
Amplifier
Optional
Because a geared axis takes up two encoder channels, the total
number of geared axes supported per chipset is 1/2 the total #of axes.
In addition, the master /slave axis combinations are fixed. The following
chart shows the allowed master/slave combinations for each chipset:
chipset p/n
MC1231A
MC1131A
gear pairs (master -> slave)
#2 -> #1
not available
Typically the master axis is only used for encoder input. It is possible
however to use the master axis as a normal driven axis by leaving it
enabled, and using one of the three trajectory modes other than
electronic gear for the master axis. The net effect of this will be to run
two servo motors off of the same trajectory profile (although at a
different ratio if so programmed).
This configuration is shown in the previous diagramas 'optional'
components. Using this configuration the chipset can be made to
performuseful functions such as linear interpolation of two axis.
There are no restrictions on changing the gear ratio when the axis
is in motion, although care should be taken to select ratios such
that safe motion is maintained.
The specified gear ratio (SET_RATIO command) indicates the
number of target counts generated per input encoder count. For
example a gear ratio of 1.5 means 1.5 counts of the slave axis are
generated for every count of the master axis.
There are also no restrictions on changing to this profile mode
while the axes is in motion.
Trajectory Control
Normally each of the above trajectory modes will execute the specified
trajectory, within the specified parameter limts, until the profile
conditions are satisfied. For example for the point-to-point profile modes
this means that the profile will move the axis until the final destination
position has been reached, at which point the axis will have a velocity
of zero.
Halting The Trajectory
In some cases however it is necessary to halt the trajectory manually,
for safety reasons, or simply to achieve a particular desired profile. This
can be accomplished using one of two methods; abrupt stop, or smooth
stop.
Abrupt stops are accomplished using the STOP command. This
command instantaneously stops the trajectory generator by setting the
velocity of the axis to zero. This control mode is typically used during an
emergency stop, when no deceleration phase is desired.
Smooth stops are accomplished using the SMOOTH_STOP command.
This command causes the trajectory to decelerate at a rate equal to the
specified acceleration rate, until a velocity of zero is reached. In
addition the formof the deceleration is symmetric to the acceleration
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| MC1251A-E | Advanced Brushless Motor Control Chipset |
| MC1401A | Advanced Brushless Motor Control Chipset |
| MC1401A-P | Advanced Brushless Motor Control Chipset |
| MC1451A | Advanced Brushless Motor Control Chipset |
| MC1451A-E | Advanced Brushless Motor Control Chipset |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| MC1251A-E | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:Advanced Step Motor Control Chipset |
| MC-125-342 | 制造商:Brady Corporation 功能描述:WIRE MARKER SLEEVES, HEAT-SHRINK, 0.235"W, 7FT; Marker Material:PO (Polyolefin); Marker Dimensions:5.97mm x 2.134m; Legend:Blank (No Legend); Legend Color:Black; Background Color:White; Color:Black on White; Label Size:0.235"W x 7'L ;RoHS Compliant: Yes |
| MC-125-342-YL | 制造商:Brady Corporation 功能描述:WIRE MARKER SLEEVES, HEAT-SHRINK, 0.235"W, 7FT; Marker Material:PO (Polyolefin); Marker Dimensions:5.97mm x 2.134m; Legend:Blank (No Legend); Legend Color:Black; Background Color:Yellow; Color:Black on Yellow; Series:M ;RoHS Compliant: Yes |
| MC-12551-00 | 制造商:EAO International 功能描述:SWITCH SPNO |
| MC-12555-00 | 制造商:EAO International 功能描述:SWITCH SPNO R/A |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。