- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄376151 > MC1241A (Electronic Theatre Controls, Inc.) Advanced Brushless Motor Control Chipset PDF資料下載
參數(shù)資料
| 型號: | MC1241A |
| 廠商: | Electronic Theatre Controls, Inc. |
| 英文描述: | Advanced Brushless Motor Control Chipset |
| 中文描述: | 先進(jìn)的無刷電機(jī)控制芯片組 |
| 文件頁數(shù): | 37/70頁 |
| 文件大小: | 474K |
| 代理商: | MC1241A |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁當(dāng)前第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁第64頁第65頁第66頁第67頁第68頁第69頁第70頁
37
received, the phase offset value will be stored as a positive number with
a value between 0 and the number of encoder counts per electrical
cycle.
To convert the phase offset value which is in encoder counts to degrees
the following expression can be used:
Offsetdegrees = 360 *Offsetcounts/counts_per_cycle
where:
Offsetdegrees is the phase offset in degrees
Offsetcounts is the phase offset in encoder counts
counts_per_cycle is the #of counts per electrical cycle set
using the SET_PHASE_CNTS command
The phase offset value can also be changed any number of times while
the motor is in motion, although only relatively small changes should be
made to avoid sudden jumps in the motor motion.
The SET_PHASE_OFFSET and GET_PHASE_OFFSET commands
can only be used when an index pulse from the encoder is
connected. If no index pulse is used the phase offset angle can
not be adjusted or read back by the host
Setting the phase offset value does not change the relative
phasing of phase B and C to phase A These phases are still set at
either 90 or 120 degree offsets from phase A (depending on the
waveform chosen).
Encoder Pre-Scalar
Particularly when used with linear motors, the range in the value of the
#of encoder counts per electrical cycle can vary widely. Typical rotary
motors can have a value between 129 and 32,767. Linear brushless
motors however can have values of 1,000,000 counts per cycle or
higher because they often use high accuracy laser-based encoders.
To accommodate this large range the MC1231A series chips support a
prescalar function which, for the purposes of commutation calculations,
divides the incomng encoder counts by 64. With the prescalar enabled
the max range for the number of encoder counts per electrical cycle is
2,097,088.
To enable the prescalar use the command SET_PRESCALE_ON. To
disable the prescalar use the command SET_PRESCALE_OFF.
The prescalar function should not be enabled or disabled once the
motor has been put in motion.
The prescalar function only affects the commutation of the
chipset. It does not affect the position used during servo filtering,
or requested by the command GET_ACTL_POS.
Velocity-Based Phase Advance
Because of inductance and magnetic field setup delays a lag may exist
between the motor command signals fromthe chipset and the desired
magnetic field in the motor. This lag can reduce the efficiency and
maximumvelocity of the motor.
To compensate for this effect the MC1231A chipsets provide the ability
to advance the commutation phase of the motor during rotation so that
the actual magnetic field experienced by the motor more closely
resembles the optimumvalues.
The phase advance value is determned by a combination of the motor
velocity, and a phase advance gain value specified by the host. The
phase advance value is calculated as follows:
phase_advance = motor_velocity *KPHASE/1000
where:
phase_advance is in units of encoder counts
motor_velocity is in units of encoder counts/sample time
KPHASE is the host-specified gain phase advance gain
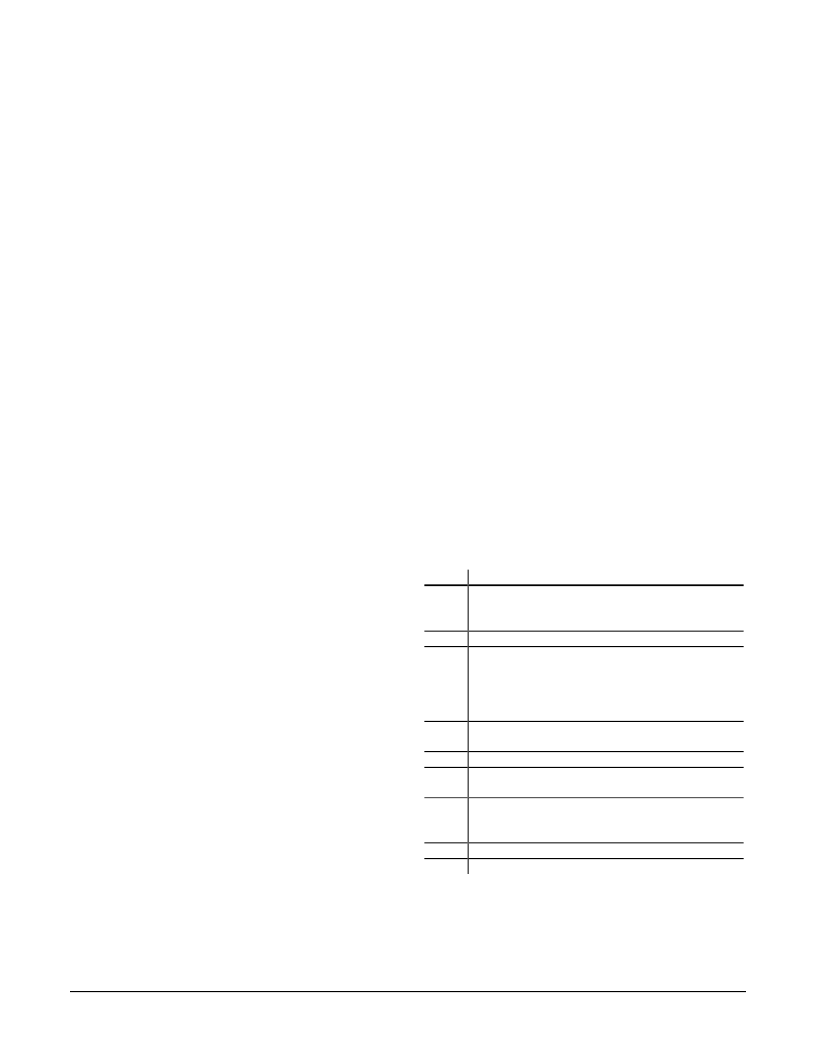
Phase Info Status Word
A status word is available that indicates the current value of various
phasing-related conditions.
The phase information status word is a 16-bit register which can be
queried using the command GET_PHASE_INFO. It contains the
following information (Bit encoding is 0 = LSB, 15 = MSB):
Bit #
0
Description
Phase initialization mode. This bit will be set to 1 if the
initialization mode is hall-based, 0 if the initialization mode
is algorithmc.
used internally by chipset (may be 0 or 1)
Commutation mode. This bit indicates whether the
commutation mode has been set to mcrostepping
(SET_PHASE_MICRO cmd) or encoder-based
(SET_PHASE_ENC cmd). A 1 indicates mcrostepping
mode.
Waveform This bit indicates whether the output waveform
is 3-phase (0) or 2-phase (1)
Used internally by chipset (may be 0 or 1)
Prescalar status. This bit indicates whether the prescalar is
active. A 1 indicates it is active.
Phase initialization not completed. This bit indicates that
phase initialization has not been completed yet. A 1
indicates that initialization has not been completed.
used internally by chipset may be 0 or 1)
Unused (set to 0)
1
2
3
4-6
7
8
9
10-15
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| MC1251A | Advanced Brushless Motor Control Chipset |
| MC1251A-E | Advanced Brushless Motor Control Chipset |
| MC1401A | Advanced Brushless Motor Control Chipset |
| MC1401A-P | Advanced Brushless Motor Control Chipset |
| MC1451A | Advanced Brushless Motor Control Chipset |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| MC12429 | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:HIGH FREQUENCY CLOCK SYNTHESIZER |
| MC12429FN | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:HIGH FREQUENCY PLL CLOCK GENERATOR |
| MC12430FA | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:HIGH FREQUENCY PLL CLOCK GENERATOR |
| MC12430FN | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:HIGH FREQUENCY PLL CLOCK GENERATOR |
| MC12439 | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:HIGH FREQUENCY PLL CLOCK GENERATOR |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。