- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄383239 > L7250 (意法半導(dǎo)體) 5V & 12V SPINDLE AND VCM MOTORS DRIVER PDF資料下載
參數(shù)資料
| 型號(hào): | L7250 |
| 廠商: | 意法半導(dǎo)體 |
| 英文描述: | 5V & 12V SPINDLE AND VCM MOTORS DRIVER |
| 中文描述: | 5V的 |
| 文件頁數(shù): | 24/46頁 |
| 文件大小: | 478K |
| 代理商: | L7250 |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁當(dāng)前第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁
L7250
24/46
2.7.2 Open Loop Commutation
After position sense is complete, the microcontroller commutates the motor following a constant acceleration
profile until sufficient BEMF is developed to reliably measure it.
The starting position of the open loop commutation, determined by the position sense routine, is set up by first
initializing the Memory Address Counter using LOADCP (*1), then clocking ADVANCE (*2) the appropriate
number of times (8 pulses per 6 state position). The spindle state will be OLCOAST while setting the initial state.
Then, drivers are enabled in either OL_SIX or OL_SIN modes (*3) , depending on whether 6 state or sine mode
open loop commutation is desired. Once the motor is accelerated up to an appropriate speed (*4) , the motor
is tri-stated by transitioning to the OLCOAST (*5) and then CLCOAST states, as described below, to synchro-
nize the Smoothdrive system to the motor.
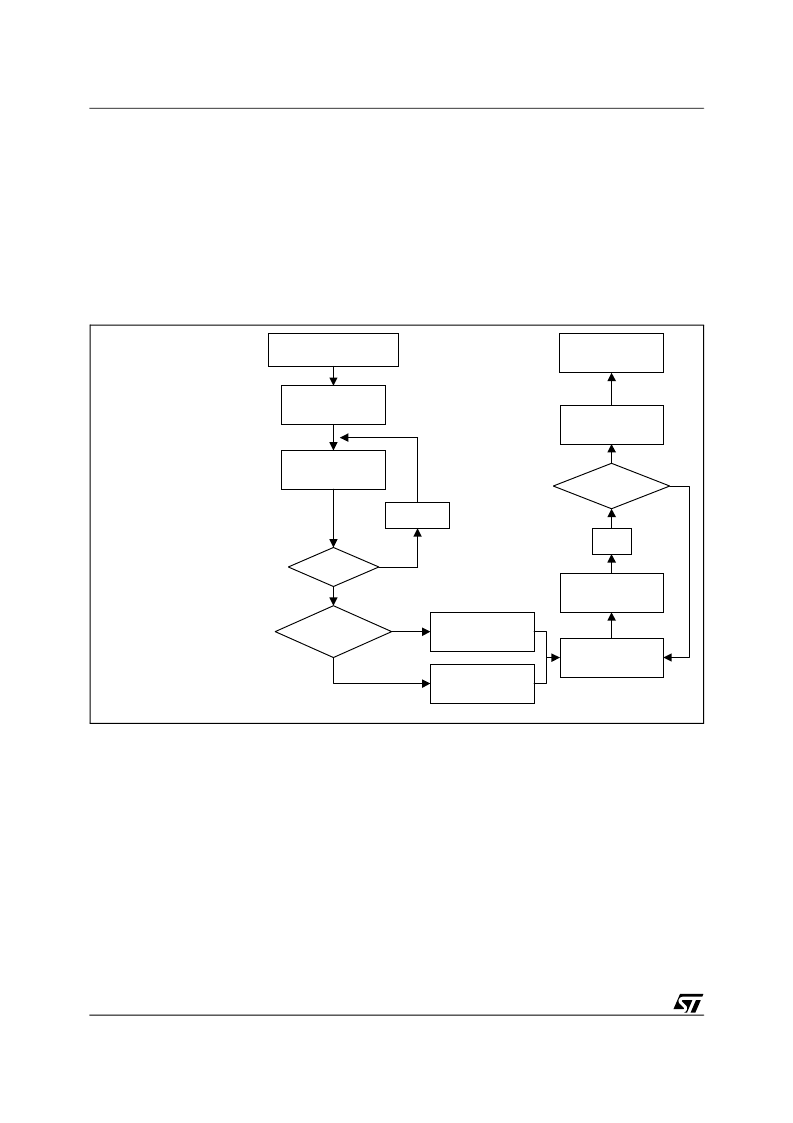
Figure 5. Open Loop Commutation
2.7.3 Synchronization to Smoothdrive Commutation
When the open loop commutation is complete, the drivers are put in OLCOAST mode, and after a delay for set-
ting the Bemf sampling period, CLCOAST is asserted, so that a ZC Period (Tc, the time between two BEMF
zero crossings) can be detected and measured.
The BEMF sampling period is set in OLCOAST (*1) and after a delay (30 usec ) a Load CP (*2) is asserted.
After a delay of time Tc0 (300usec suggested) another Load CP is asserted (*3); this initializes the electrical
period for BEMF sampling. Once pregrammed the transition to CLCOAST (*4) , the BEMF is sampled at the
rate of Tc0 to look for two consecutive LOW readings (in anticipation of the LOW->HI zero crossing transition
(*5) ).
After the first ZC rising edge, the BEMF sampling period is refreshed to Tc0 value.
If two consecutive ZC edges are detected (*6), then after the last rising edge the Smoothdrive commutation is
synchronized with the motor rotor position and it is ready to be programmed in closed loop commutation .
At least two ZCs must be observed before transitioning to closed loop spinup (CLSIX or CLSIN) (*7a or *7b) .
This ensures that the Smoothdrive circuitry is synchronized to the spindle motor.
Set Load Coarse Phase
Write Reg.07H
LoadCP = 1
(*1)
Set ADVANCE
Write Reg.07H
Advance = 1
Nadv=Nalign
Inc Nadv
START
Open Loop Commutation
Nadv=0 , i=0
Note2: Nalign is received from
the Inductive Sense routine
Indicating the rotor position
alignement
Accelerate in
Sine or Six
Set Open Loop SINE
Write Reg.03H
Spstate[3:0] =0011
Set Open Loop SIX
Write Reg.03H
Spstate[3:0] =0010
Set ADVANCE
Write Reg.07H
Advance = 1
Wait the End of
RAMP_DELAY[ i ]
Inc i
i = RAMP_Steps
Set OLCOAST
Write Reg.03H
Spstate[3:0]=0001
EXIT
Open Loop
Commutation
(*2)
(*3)
(*4)
(*5)
SINE
SIX
Note1: Spstate[3:0] condition has
been set in OLCOAST
by the Inductive Sense
Routine
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| L7805ABD2T-TR | Precision 1A regulators |
| L7805ACD2T-TR | Precision 1A regulators |
| L7806ABD2T-TR | Precision 1A regulators |
| L7806ACD2T-TR | Precision 1A regulators |
| L7808ABD2T-TR | Precision 1A regulators |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| L7250E1.2 | 功能描述:電源開關(guān) IC - 配電 DSD POWER RoHS:否 制造商:Exar 輸出端數(shù)量:1 開啟電阻(最大值):85 mOhms 開啟時(shí)間(最大值):400 us 關(guān)閉時(shí)間(最大值):20 us 工作電源電壓:3.2 V to 6.5 V 電源電流(最大值): 最大工作溫度:+ 85 C 安裝風(fēng)格:SMD/SMT 封裝 / 箱體:SOT-23-5 |
| L7252E2.6 | 功能描述:電源開關(guān) IC - 配電 DSD POWER RoHS:否 制造商:Exar 輸出端數(shù)量:1 開啟電阻(最大值):85 mOhms 開啟時(shí)間(最大值):400 us 關(guān)閉時(shí)間(最大值):20 us 工作電源電壓:3.2 V to 6.5 V 電源電流(最大值): 最大工作溫度:+ 85 C 安裝風(fēng)格:SMD/SMT 封裝 / 箱體:SOT-23-5 |
| L725MAG | 制造商:Apex Tool Group 功能描述:TAPE, 1 IN. X 25 FT, 700 SERIES, MAGNETIC END HOOK 制造商:Lufkin 功能描述:TAPE MEASURE, MAGNETIC END HOOK 25FT 1IN; Tape Measure Type:Manual; Measuring Range Max:25ft; Blade Width:1"; Case Color:Orange; Tool Body Material:ABS; Blade Finish:Yellow Clad; Blade Length:25ft ;RoHS Compliant: NA |
| L728 | 制造商:BURNDY 功能描述:L-DIE |
| L7290 | 制造商:CIPS 功能描述:CUTTER OBLIQUE SEMI FLUSH 109MM |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。