- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄24810 > 935287967518 (NXP SEMICONDUCTORS) DATACOM, INTERFACE CIRCUIT, PDSO8 PDF資料下載
參數(shù)資料
| 型號(hào): | 935287967518 |
| 廠商: | NXP SEMICONDUCTORS |
| 元件分類: | 網(wǎng)絡(luò)接口 |
| 英文描述: | DATACOM, INTERFACE CIRCUIT, PDSO8 |
| 封裝: | 3.90 MM, PLASTIC, MS-012, SOT96-1, SOP-8 |
| 文件頁數(shù): | 18/23頁 |
| 文件大小: | 383K |
| 代理商: | 935287967518 |
2003 Oct 22
4
Philips Semiconductors
Product specication
High speed CAN transceiver
TJA1050
FUNCTIONAL DESCRIPTION
The TJA1050 is the interface between the CAN protocol
controller and the physical bus. It is primarily intended for
high-speed automotive applications using baud rates from
60 kbaud up to 1 Mbaud. It provides differential transmit
capability to the bus and differential receiver capability to
the CAN protocol controller. It is fully compatible to the
“ISO 11898” standard.
A current-limiting circuit protects the transmitter output
stage from damage caused by accidental short-circuit to
either positive or negative supply voltage, although power
dissipation increases during this fault condition.
A thermal protection circuit protects the IC from damage
by switching off the transmitter if the junction temperature
exceeds a value of approximately 165
°C. Because the
transmitter dissipates most of the power, the power
dissipation and temperature of the IC is reduced. All other
IC functions continue to operate. The transmitter off-state
resets when pin TXD goes HIGH. The thermal protection
circuit is particularly needed when a bus line short-circuits.
The pins CANH and CANL are protected from automotive
electrical transients (according to
“ISO 7637”; see Fig.4).
Control pin S allows two operating modes to be selected:
high-speed mode or silent mode.
The high-speed mode is the normal operating mode and is
selected by connecting pin S to ground. It is the default
mode if pin S is not connected. However, to ensure EMI
performance in applications using only the high-speed
mode, it is recommended that pin S is connected to
ground.
In the silent mode, the transmitter is disabled. All other
IC functions continue to operate. The silent mode is
selected by connecting pin S to VCC and can be used to
prevent network communication from being blocked, due
to a CAN controller which is out of control.
A ‘TXD dominant time-out’ timer circuit prevents the bus
lines being driven to a permanent dominant state (blocking
all network communication) if pin TXD is forced
permanently LOW by a hardware and/or software
application failure. The timer is triggered by a negative
edge on pin TXD. If the duration of the LOW-level on
pin TXD exceeds the internal timer value, the transmitter is
disabled, driving the bus into a recessive state. The timer
is reset by a positive edge on pin TXD.
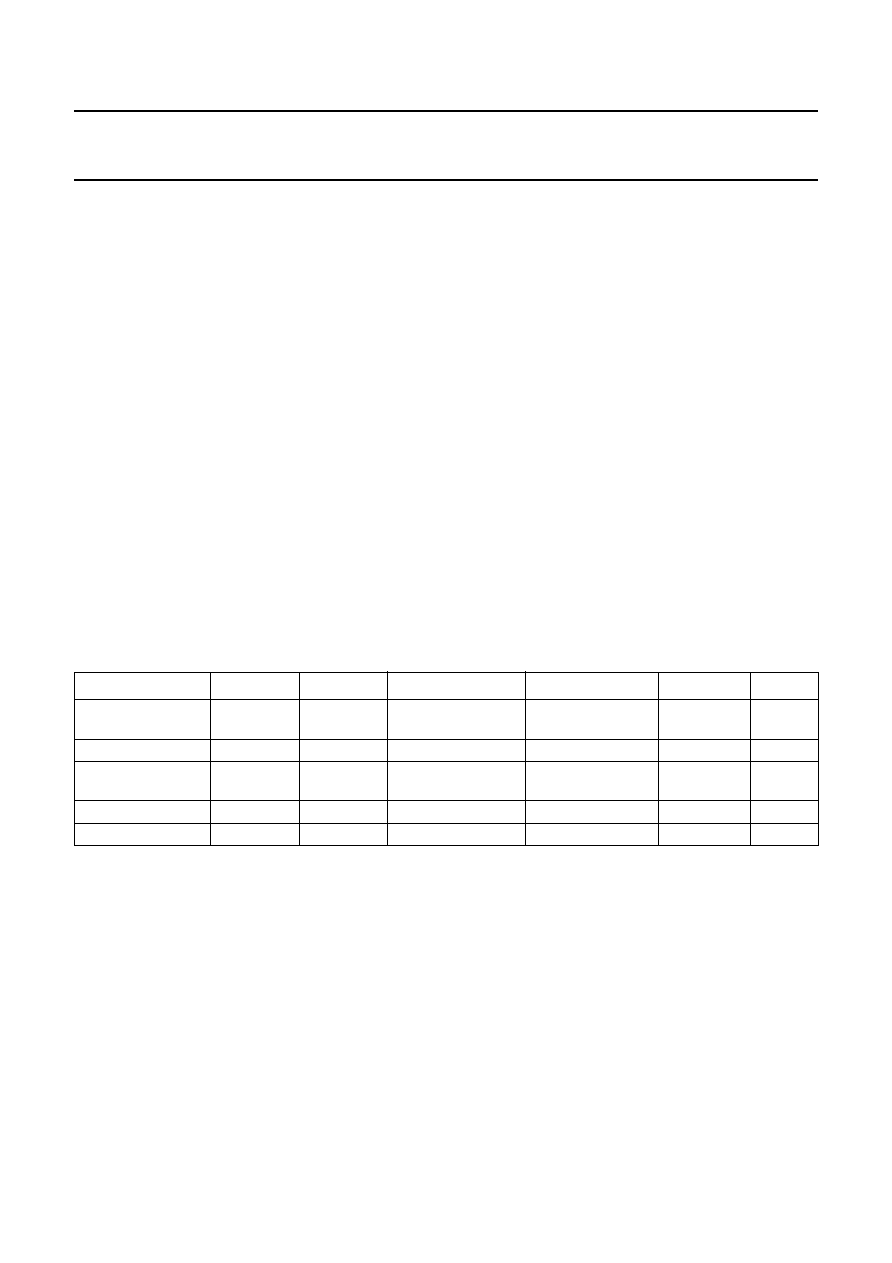
Table 1
Function table of the CAN transceiver; X = don’t care
VCC
TXD
S
CANH
CANL
BUS STATE
RXD
4.75 V to 5.25 V
LOW
LOW (or
oating)
HIGH
LOW
dominant
LOW
4.75 V to 5.25 V
X
HIGH
0.5VCC
recessive
HIGH
4.75 V to 5.25 V
HIGH (or
oating)
X
0.5VCC
recessive
HIGH
<2 V (not powered)
X
0 V < VCANH <VCC
0V<VCANL <VCC
recessive
X
2V<VCC < 4.75 V
>2 V
X
0 V < VCANH <VCC
0V<VCANL <VCC
recessive
X
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| 935263363112 | DATACOM, INTERFACE CIRCUIT, PDSO8 |
| 935263363118 | DATACOM, INTERFACE CIRCUIT, PDSO8 |
| 935263364005 | DATACOM, INTERFACE CIRCUIT, UUC8 |
| 935263364027 | DATACOM, INTERFACE CIRCUIT, UUC8 |
| 935263370118 | 10 1-BIT DRIVER, TRUE OUTPUT, PDSO24 |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| 935288287551 | 制造商:NXP Semiconductors 功能描述:- Trays |
| 935288287557 | 制造商:NXP Semiconductors 功能描述:- Trays |
| 935288465027 | 制造商:NXP Semiconductors 功能描述:IC SMARTCARD RTC OSC COUNTER |
| 935288948115 | 制造商:NXP Semiconductors 功能描述:IC ANALOG SWITCH SP3T 10XQFN |
| 935288949115 | 制造商:NXP Semiconductors 功能描述:IC ANALOG SWITCH SPDT 10XQFN |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。