- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄230922 > RD-19240FG-200T (DATA DEVICE CORP) SYNCHRO OR RESOLVER TO DIGITAL CONVERTER, PQFP52 PDF資料下載
參數(shù)資料
| 型號: | RD-19240FG-200T |
| 廠商: | DATA DEVICE CORP |
| 元件分類: | 位置變換器 |
| 英文描述: | SYNCHRO OR RESOLVER TO DIGITAL CONVERTER, PQFP52 |
| 封裝: | 10 X 10 MM, ROHS COMPLIANT, PLASTIC, MQFP-52 |
| 文件頁數(shù): | 4/19頁 |
| 文件大?。?/td> | 432K |
| 代理商: | RD-19240FG-200T |
12
Data Device Corporation
www.ddc-web.com
RD-19240
F-02/09-0
resolution of the parallel data outputs may be changed any
time after the encoder resolution is latched (see FIGURE
15).
When in A_QUAD_B mode, the resolution of the parallel data
can be changed to a resolution equal to or greater than the
A_QUAD_B resolution setting only. For example if the
A_QUAD_B mode is active and the resolution is set to 12 bits,
the resolution of the parallel programmed data can be changed
from 12 to 14 bits by using D0 & D1. If 10-bit mode is required for
the parallel data, the A_QUAD_B resolution must also be pro-
grammed to 10 bits.
Note: The encoder resolution must be less than or equal to the
resolution of the parallel data outputs. Refer to FIGURE 17.
The timing of the A, B and ZIP (or North Reference Pole [NRP])
output
is
dependent
on
the
rate
of
change
of
the
synchro/resolver position (rps or degrees per second) and the
INTERNAL ENCODER EMULATION
The RD-19240 can be programmed to encoder emulation
mode by toggling the A_QUAD_B input to a logic 0. The U/B
output pin becomes B (LSB XOR LSB + 1). The A (LSB + 1)
and B output signals can be used in control systems that are
designed to interface with incremental optical encoders. To
enable the Zero Index pulse, ZIP_EN should be tied to a
logic 0.
An example circuit to create a low going edge of A_QUAD_B is
depicted in FIGURE 16. If the power supply takes longer than
50ms to start up then the time constant of 50ms set in FIGURE
16 will require being extended. Alternatively a system logic reset
signal or internally generated logic ‘load’ pulse can be generated
to latch in the encoder resolution.
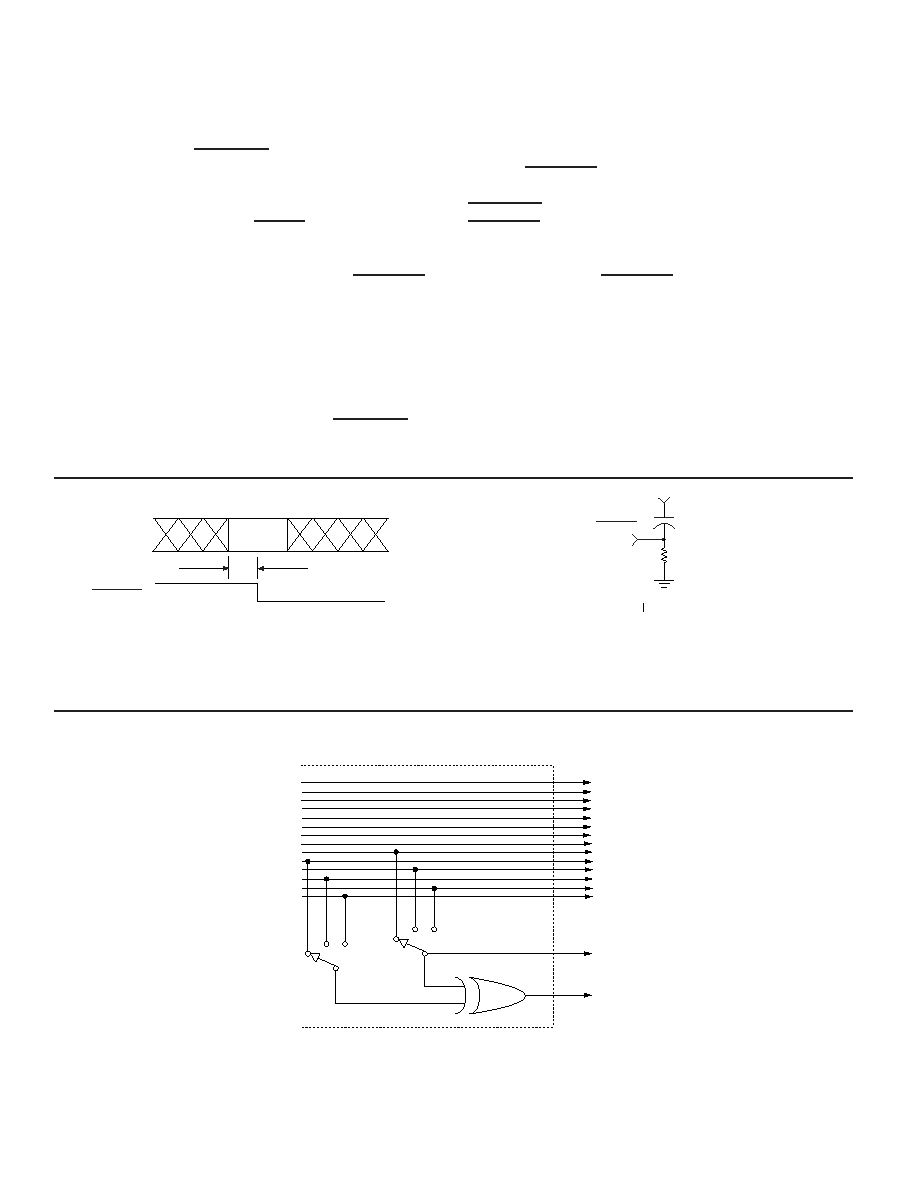
The resolution of the incremental outputs is latched from the
D0 and D1 inputs on the low going edge of A_QUAD_B. The
RD-19240
1 MSB
2
3
4
9
10
11
12
13
14 LSB
B
1
0
1
2
1
4
A
5
6
7
8
FIGURE 17. INCREMENTAL ENCODER EMULATION RESOLUTION CONTROL
DATA
VALID
50 nsec
D0/D1
A QUAD B
FIGURE 15. TIMING FOR INCREMENTAL ENCODER
EMULATION RESOLUTION CONTROL
A quad B
C
+5V
R
~
= RC
(i.e., 50ms = 50kohms x 1f)
FIGURE 16. EXAMPLE CIRCUIT FOR A QUAD B
RESET
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| RD-14597F1-824S | SYNCHRO OR RESOLVER TO DIGITAL CONVERTER, CDFP36 |
| RDC-19220S-403Z | SYNCHRO OR RESOLVER TO DIGITAL CONVERTER, CDIP40 |
| RDC-19220S-422K | SYNCHRO OR RESOLVER TO DIGITAL CONVERTER, CDIP40 |
| RDC-19220S-422L | SYNCHRO OR RESOLVER TO DIGITAL CONVERTER, CDIP40 |
| RD-14597F1-234L | SYNCHRO OR RESOLVER TO DIGITAL CONVERTER, CDFP36 |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| RD1-9320 | 制造商:STMicroelectronics 功能描述:MPU DEMO-BOARD |
| RD1950MPXM2010GS | 制造商:Freescale Semiconductor 功能描述:WATER LEVEL REFERENCE DESIGN - Bulk |
| RD1986MMA2260D | 功能描述:加速傳感器開發(fā)工具 TRIAX REF DSGN 3-AXIS FOR MMA2260D RoHS:否 制造商:Murata 工具用于評估:SCA3100-D04 加速:2 g 傳感軸:Triple Axis 接口類型:SPI 工作電壓:3.3 V |
| RD1986MMA6260Q | 功能描述:加速傳感器開發(fā)工具 TRIAX REF DSGN 3-AXIS FOR NMA6260Q RoHS:否 制造商:Murata 工具用于評估:SCA3100-D04 加速:2 g 傳感軸:Triple Axis 接口類型:SPI 工作電壓:3.3 V |
| RD1A-12S | 制造商:World Products 功能描述: |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。