- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄384639 > M54649L (Mitsubishi Electric Corporation) DUAL Bi-DIRECTIONAL MOTOR DRIVER PDF資料下載
參數(shù)資料
| 型號: | M54649L |
| 廠商: | Mitsubishi Electric Corporation |
| 英文描述: | DUAL Bi-DIRECTIONAL MOTOR DRIVER |
| 中文描述: | 雙雙定向電機驅(qū)動 |
| 文件頁數(shù): | 1/4頁 |
| 文件大小: | 98K |
| 代理商: | M54649L |
DUAL Bi-DIRECTIONAL MOTOR DRIVER
M54649L
MITSUBISHI <CONTROL / DRIVER IC>
DESCRIPTION
The M54649L is a semiconductor integrated circuit that is capable
of directly driving two smallsize bi-directional motors rotating in
both forward and reverse directions.
FEATURES
G
Capable of driving two motors in both forward and reverse
directions
G
Equipped with “H” output voltage control pin
G
Built-in thermal protection circuit
G
Large output current drive (I
O(max)
= 1.6A)
G
Wide range of operating supply voltage (V
CC
= 4 – 18V)
G
Capable of directly driving with CMOS IC output
APPLICATION
Sound equipment such as tape deck and radio cassette, VTR, and
other general consumer appliances
FUNCTION
The M54649L consists of input circuit, control circuit, constant
current circuit and output circuit.
Two motors are connected to the IC; both of them are connected to
output pin O
1
, and one is connected to output O
2
, and the other is
connected to output O
3
. The motors are controlled by three input
levels of input pins IN
1
to IN
3
. As shown in the logic truth table, the
control statuses of ‘forward rotation’, ‘reverse rotation’, ‘brake’ and
‘OFF’ are selectable.
The input circuit provides hysteresis functions that prevent
malfunction due to rounding at rising edge and falling edge of input
signals.
Both the current source side and sink side of the output circuit
adopt Darlington circuit configuration of the NPN transistor,
allowing up to ±1.6A output current to flow.
In addition, the IC contains a thermal protection circuit to put all
outputs in the “OPEN” mode for preventing the IC from thermal
braking when failures such as motor lock occurs.
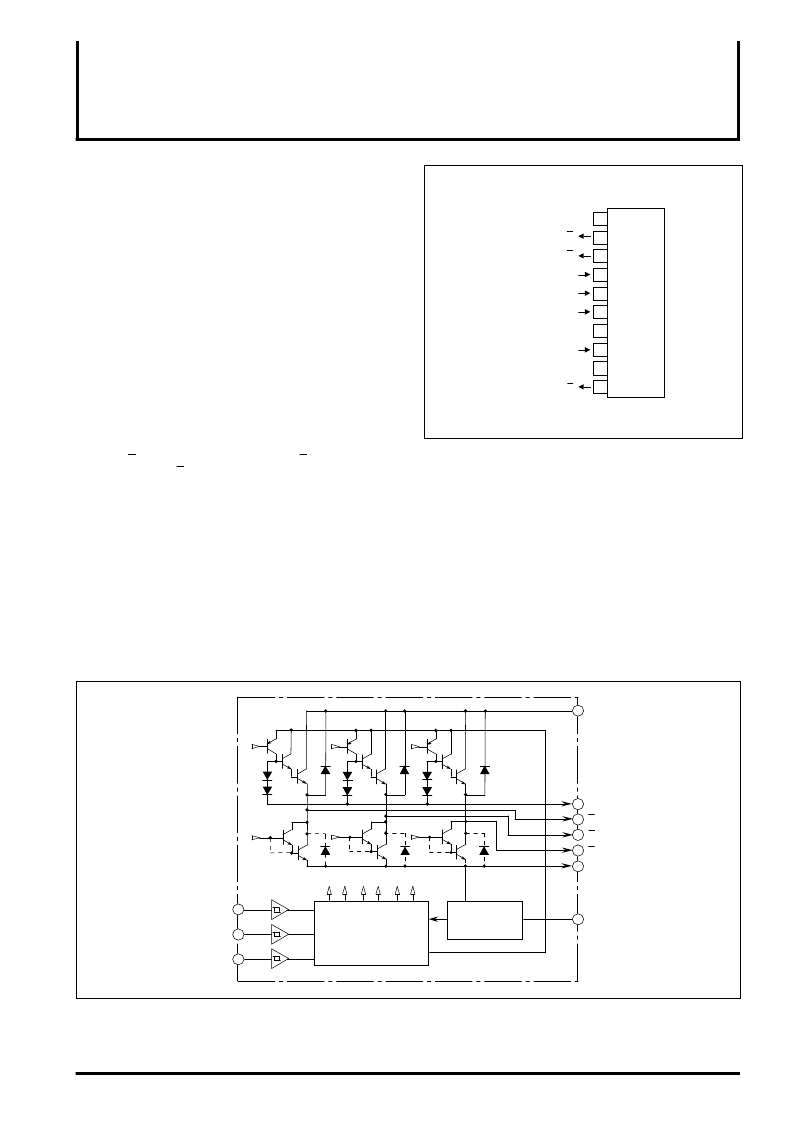
PIN CONFIGURATION (TOP VIEW)
1
4
3
2
5
6
7
8
9
10
Outline 10P5
BLOCK DIAGRAM
Input 1 IN
1
Input 2 IN
2
Input 3 IN
3
Control circuit
Constant current
circuit (thermal
shutdown circuit)
GND
V
CC1
V
CC2
Power supply 2 for output
VR
Input for output control
O
2
Output 2
O
3
Output 3
M
GND
Output 2
O
2
Output 3
O
3
Input 1
IN
1
Input 2
IN
2
Input 3
IN
3
Power supply 1
V
CC1
Input for output control
V
R
Power supply 2 for output
V
CC2
Output 1
O
1
Output 1
O
1
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| M54670P | 2-PHASE STEPPER MOTOR DRIVER |
| M54670 | 2-PHASE STEPPER MOTOR DRIVER |
| M54671SP | 2-PHASE STEPPER MOTOR DRIVER |
| M54672SP | 2-PHASE STEPPER MOTOR DRIVER |
| M54676 | 2-PHASE STEPPER MOTOR DRIVER |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| M54654P | 制造商:MITSUBISHI 制造商全稱:Mitsubishi Electric Semiconductor 功能描述:QUADRUPLE LINE RECEIVER(BIPOLAR DIGITAL ICs) |
| M54655P | 制造商:Mitsubishi Electric 功能描述:Interface IC |
| M54666P | 制造商:Panasonic Industrial Company 功能描述:IC |
| M54670 | 制造商:MITSUBISHI 制造商全稱:Mitsubishi Electric Semiconductor 功能描述:2-PHASE STEPPER MOTOR DRIVER |
| M54670P | 制造商:MITSUBISHI 制造商全稱:Mitsubishi Electric Semiconductor 功能描述:2-PHASE STEPPER MOTOR DRIVER |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。