- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄383236 > L6258E (意法半導(dǎo)體) PWM CONTROLLED - HIGH CURRENT DMOS UNIVERSAL MOTOR DRIVER PDF資料下載
參數(shù)資料
| 型號(hào): | L6258E |
| 廠商: | 意法半導(dǎo)體 |
| 元件分類: | 基準(zhǔn)電壓源/電流源 |
| 英文描述: | PWM CONTROLLED - HIGH CURRENT DMOS UNIVERSAL MOTOR DRIVER |
| 中文描述: | PWM控制-大電流DMOS的通用型電機(jī)驅(qū)動(dòng) |
| 文件頁數(shù): | 10/24頁 |
| 文件大小: | 216K |
| 代理商: | L6258E |
L6258E
10/24
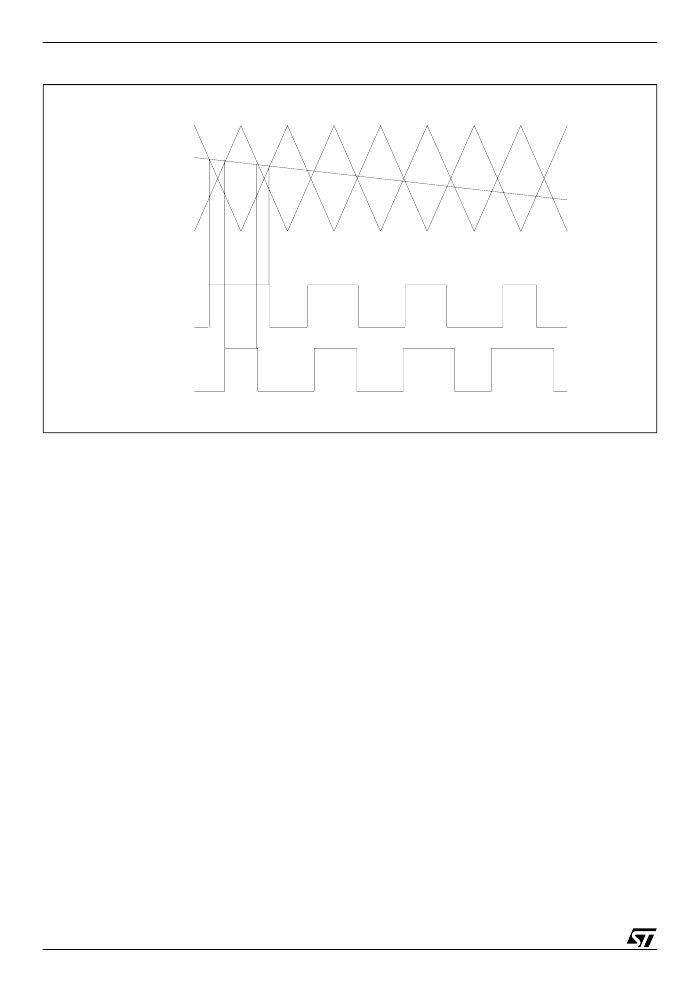
Figure 7. Output comparator waveforms
In the case of V
DAC
equal to zero, the transconductance loop is balanced at the value of Vr, so the outputs of
the two comparators are signals having the same phase and 50% of duty cycle .
As we have already mentioned, in this situation, the two outputs OUT_A and OUT_B are simultaneously driven
from V
s
to ground ; and the differential voltage across the load in this case is zero and no current flows in the
motor winding.
With a positive differential voltage on V
DAC
(see Fig 6, the transconductance loop will be positively unbalanced
respected Vr.
In this case being the error amplifier output voltage greater than Vr, the output of the first comparator is a square
wave with a duty cycle higher than 50%, while the output of the second comparator is a square wave with a duty
cycle lower than 50%.
The variation in duty cycle obtained at the outputs of the two comparators is the same, but one is positive and
the other is negative with respect to the 50% level.
The two driving signals, generated in this case, drive the two outputs in such a way to have switched current
flowing from OUT_A through the motor winding to OUT_B.
With a negative differential voltage V
DAC
, the transconductance loop will be negatively unbalanced respected Vr.
In this case the output of the first comparator is a square wave with a duty cycle lower than 50%, while the output
of the second comparator is a square wave with a duty cycle higher than 50%.
The variation in the duty cycle obtained at the outputs of the two comparators is always of the same.
The two driving signals, generated in this case, drive the the two outputs in order to have the switched current
flowing from OUT_B through the motor winding to OUT_A.
3.7 Current Control Loop Compensation
In order to have a flexible system able to drive motors with different electrical characteristics, the non inverting
input and the output of the error amplifier ( EA_OUT ) are available.
Connecting at these pins an external RC compensation network it is possible to adjust the gain and the band-
width of the current control loop.
Tri_0
Tri_180
Error Ampl.
Output
First Comp.
Output
Second Comp.
Output
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| L6258EX | PWM CONTROLLED - HIGH CURRENT DMOS UNIVERSAL MOTOR DRIVER |
| L6260 | 4.5 - 5.5V DISK DRIVER SPINDLE & VCM, POWER & CONTROL COMBO’S |
| L6268 | 12V DISK DRIVE SPINDLE & VCM, POWER & CONTROL “COMBO” |
| L6269 | 12V DISK DRIVE SPINDLE & VCM, POWER & CONTROL “COMBO” |
| L6270 | MILLI-ACTUATOR DRIVER |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| L6258E_07 | 制造商:STMICROELECTRONICS 制造商全稱:STMicroelectronics 功能描述:PWM controlled high current DMOS universal motor driver |
| L6258EA | 制造商:STMICROELECTRONICS 制造商全稱:STMicroelectronics 功能描述:PWM controlled high current DMOS universal motor driver |
| L6258EP | 制造商:STMICROELECTRONICS 制造商全稱:STMicroelectronics 功能描述:PWM controlled high current DMOS universal motor driver |
| L6258EP_07 | 制造商:STMICROELECTRONICS 制造商全稱:STMicroelectronics 功能描述:PWM controlled high current DMOS universal motor driver |
| L6258EX | 功能描述:馬達(dá)/運(yùn)動(dòng)/點(diǎn)火控制器和驅(qū)動(dòng)器 1.5A Stepper Motor RoHS:否 制造商:STMicroelectronics 產(chǎn)品:Stepper Motor Controllers / Drivers 類型:2 Phase Stepper Motor Driver 工作電源電壓:8 V to 45 V 電源電流:0.5 mA 工作溫度:- 25 C to + 125 C 安裝風(fēng)格:SMD/SMT 封裝 / 箱體:HTSSOP-28 封裝:Tube |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。