- 您現(xiàn)在的位置:買(mǎi)賣(mài)IC網(wǎng) > PDF目錄369508 > BT136M-500G (NXP SEMICONDUCTORS) Octal Registered Transceivers with 3-State Outputs 24-SSOP/QSOP -40 to 85 PDF資料下載
參數(shù)資料
| 型號(hào): | BT136M-500G |
| 廠商: | NXP SEMICONDUCTORS |
| 元件分類(lèi): | 晶閘管 |
| 英文描述: | Octal Registered Transceivers with 3-State Outputs 24-SSOP/QSOP -40 to 85 |
| 中文描述: | 500 V, 4 A, 4 QUADRANT LOGIC LEVEL TRIAC, TO-252 |
| 封裝: | PLASTIC, SOT-428, 3 PIN |
| 文件頁(yè)數(shù): | 138/224頁(yè) |
| 文件大小: | 2697K |
| 代理商: | BT136M-500G |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)第31頁(yè)第32頁(yè)第33頁(yè)第34頁(yè)第35頁(yè)第36頁(yè)第37頁(yè)第38頁(yè)第39頁(yè)第40頁(yè)第41頁(yè)第42頁(yè)第43頁(yè)第44頁(yè)第45頁(yè)第46頁(yè)第47頁(yè)第48頁(yè)第49頁(yè)第50頁(yè)第51頁(yè)第52頁(yè)第53頁(yè)第54頁(yè)第55頁(yè)第56頁(yè)第57頁(yè)第58頁(yè)第59頁(yè)第60頁(yè)第61頁(yè)第62頁(yè)第63頁(yè)第64頁(yè)第65頁(yè)第66頁(yè)第67頁(yè)第68頁(yè)第69頁(yè)第70頁(yè)第71頁(yè)第72頁(yè)第73頁(yè)第74頁(yè)第75頁(yè)第76頁(yè)第77頁(yè)第78頁(yè)第79頁(yè)第80頁(yè)第81頁(yè)第82頁(yè)第83頁(yè)第84頁(yè)第85頁(yè)第86頁(yè)第87頁(yè)第88頁(yè)第89頁(yè)第90頁(yè)第91頁(yè)第92頁(yè)第93頁(yè)第94頁(yè)第95頁(yè)第96頁(yè)第97頁(yè)第98頁(yè)第99頁(yè)第100頁(yè)第101頁(yè)第102頁(yè)第103頁(yè)第104頁(yè)第105頁(yè)第106頁(yè)第107頁(yè)第108頁(yè)第109頁(yè)第110頁(yè)第111頁(yè)第112頁(yè)第113頁(yè)第114頁(yè)第115頁(yè)第116頁(yè)第117頁(yè)第118頁(yè)第119頁(yè)第120頁(yè)第121頁(yè)第122頁(yè)第123頁(yè)第124頁(yè)第125頁(yè)第126頁(yè)第127頁(yè)第128頁(yè)第129頁(yè)第130頁(yè)第131頁(yè)第132頁(yè)第133頁(yè)第134頁(yè)第135頁(yè)第136頁(yè)第137頁(yè)當(dāng)前第138頁(yè)第139頁(yè)第140頁(yè)第141頁(yè)第142頁(yè)第143頁(yè)第144頁(yè)第145頁(yè)第146頁(yè)第147頁(yè)第148頁(yè)第149頁(yè)第150頁(yè)第151頁(yè)第152頁(yè)第153頁(yè)第154頁(yè)第155頁(yè)第156頁(yè)第157頁(yè)第158頁(yè)第159頁(yè)第160頁(yè)第161頁(yè)第162頁(yè)第163頁(yè)第164頁(yè)第165頁(yè)第166頁(yè)第167頁(yè)第168頁(yè)第169頁(yè)第170頁(yè)第171頁(yè)第172頁(yè)第173頁(yè)第174頁(yè)第175頁(yè)第176頁(yè)第177頁(yè)第178頁(yè)第179頁(yè)第180頁(yè)第181頁(yè)第182頁(yè)第183頁(yè)第184頁(yè)第185頁(yè)第186頁(yè)第187頁(yè)第188頁(yè)第189頁(yè)第190頁(yè)第191頁(yè)第192頁(yè)第193頁(yè)第194頁(yè)第195頁(yè)第196頁(yè)第197頁(yè)第198頁(yè)第199頁(yè)第200頁(yè)第201頁(yè)第202頁(yè)第203頁(yè)第204頁(yè)第205頁(yè)第206頁(yè)第207頁(yè)第208頁(yè)第209頁(yè)第210頁(yè)第211頁(yè)第212頁(yè)第213頁(yè)第214頁(yè)第215頁(yè)第216頁(yè)第217頁(yè)第218頁(yè)第219頁(yè)第220頁(yè)第221頁(yè)第222頁(yè)第223頁(yè)第224頁(yè)
AN1003
Application Notes
http://www.teccor.com
+1 972-580-7777
AN1003 - 6
2002 Teccor Electronics
Thyristor Product Catalog
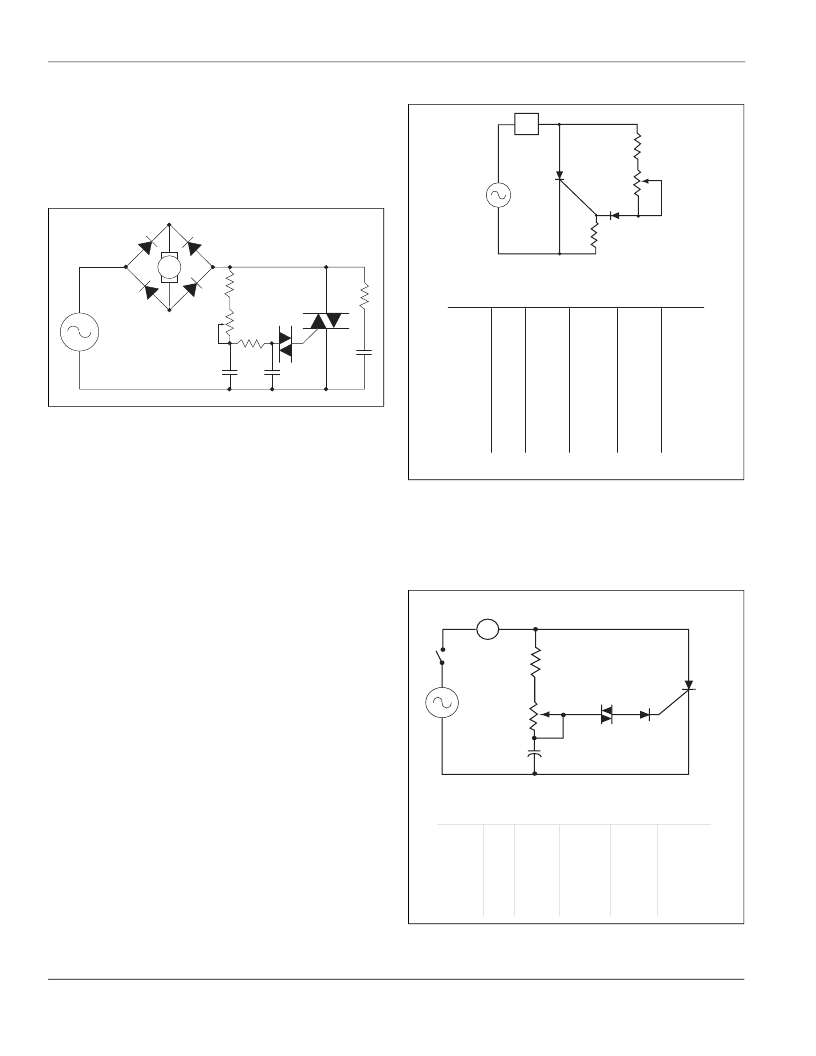
Permanent Magnet Motor Control
Figure AN1003.16 illustrates a circuit for phase controlling a per-
manent magnet (PM) motor. Since PM motors are also genera-
tors, they have characteristics that make them difficult for a
standard triac to commutate properly. Control of a PM motor is
easily accomplished by using an alternistor triac with enhanced
commutating characteristics.
Figure AN1003.16
Circuit for Phase Controlling a Permanent Magnet
Motor
PM motors normally require full-wave DC rectification. Therefore,
the alternistor triac controller should be connected in series with
the AC input side of the rectifier bridge. The possible alternative
of putting an SCR controller in series with the motor on the DC
side of the rectifier bridge can be a challenge when it comes to
timing and delayed turn-on near the end of the half cycle. The
alternistor triac controller shown in Figure AN1003.16 offers a
wide range control so that the alternistror triac can be triggered at
a small conduction angle or low motor speed; the rectifiers and
alternistors should have similar voltage ratings, with all based on
line voltage and actual motor load requirements.
SCR Phase Control
Figure AN1003.17 shows a very simple variable resistance half-
wave circuit. It provides phase retard from essentially zero (SCR
full on) to 90 electrical degrees of the anode voltage wave (SCR
half on). Diode CR
1
blocks reverse gate voltage on the negative
half-cycle of anode supply voltage. This protects the reverse gate
junction of sensitive SCRs and keeps power dissipation low for
gate resistors on the negative half cycle. The diode is rated to
block at least the peak value of the AC supply voltage. The retard
angle cannot be extended beyond the 90-degree point because
the trigger circuit supply voltage and the trigger voltage produc-
ing the gate current to fire are in phase. At the peak of the AC
supply voltage, the SCR can still be triggered with the maximum
value of resistance between anode and gate. Since the SCR will
trigger and latch into conduction the first time I
GT
is reached, its
conduction cannot be delayed beyond 90 electrical degrees with this
circuit.
Figure AN1003.17
Half-wave Control, 0° to 90° Conduction
Figure AN1003.18 shows a half-wave phase control circuit using
an SCR to control a universal motor. This circuit is better than
simple resistance firing circuits because the phase-shifting char-
acteristics of the RC network permit the firing of the SCR beyond
the peak of the impressed voltage, resulting in small conduction
angles and very slow speed.
Figure AN1003.18
Half-wave Motor Control
DC
MTR
115 V ac
Input
1.5 A
3.3 k
250 k
15 k 1/2 W
0.1
μ
F
400 V
HT-32
Q4006LH4
100
0.1
μ
F
100 V
0.1
μ
F
400 V
G
MT1
MT2
+
-
R1
IAC
SCR1
2.2 k
R3
R2
CR1
Load
IN4003
IN4003
IN4004
IN4004
IN4004
120 V ac
60 Hz
120 V ac
60 Hz
240 V ac
60 Hz
240 V ac
60 Hz
240 V ac
50Hz
0.8 A
8.5 A
0.8 A
8.5 A
2.5 A
500 k
100 k
1 M
250 k
1 M
1 k
Not
Required
1 k
Not
Required
1 k
EC103B
S2010F1
EC103D
S4010F1
T106D1
R2
R3
SCR1
CR1
AC
Input
Voltage
AC
Load
Current
M
R1
R2
C1
D1
SCR1
HT-32
3.3 k
AC
Supply
Universal Motor
CR1
AC
Input
Voltage
120 V ac
60 Hz
240 V ac
60 Hz
240 V ac
50 Hz
AC
Load
Current
8 A
6.5 A
6.5 A
150 k
200 k
200 k
IN4003
IN4004
IN4004
S2015L
S4008L
S4008L
0.1
μ
F 200 V
0.1
μ
F 400 V
0.1
μ
F 400 V
R2
CR1
SCR1
C1
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| BT136M-600 | Octal Registered Transceivers with 3-State Outputs 24-SSOP/QSOP -40 to 85 |
| BT136M-600F | Octal Registered Transceivers with 3-State Outputs 24-SOIC -40 to 85 |
| BT136M-600G | Triacs |
| BT136M-800 | Octal Registered Transceivers with 3-State Outputs 24-SOIC -40 to 85 |
| BT136M-800F | Octal Registered Transceivers with 3-State Outputs 24-SOIC -40 to 85 |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| BT136M-600 | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Triacs |
| BT136M-600D | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Triacs logic level |
| BT136M-600E | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Triacs sensitive gate |
| BT136M-600F | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Triacs |
| BT136M-600G | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Triacs |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。